InspectEdgeWidth
InspectEdgeWidth 函数用于构建边缘模型,以对 InspectEdge 函数返回的边缘对执行高级边缘分析。该数据用于检测边缘对并分析它们之间的距离。
InspectEdgeWidth 概述
将函数插入电子表格后,必须参考 InspectEdge 函数输出的 Inspect 数据结构。一旦建立了对 InspectEdge 函数的引用,就可以通过配置 InspectEdgeWidth 函数的参数来创建边缘模型。边缘模型涉及定义以下内容:
- 检测边缘的方向。
- 边缘过渡的类型 - 白色到黑色,反之亦然。
- 用于筛选不需要的边缘的边缘评分标准。
- 用于从线拟合中筛选不需要的边缘的线拟合条件。
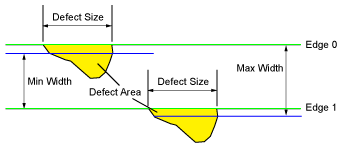
- 遇到的宽度变化、缺陷和/或间隙的公差。
- 如果检测到焊珠路径,则为位置差异的容差。
一旦建立了边缘模型,该函数会将候选边缘与边缘模型进行比较,并报告与模型的偏差。
InspectEdgeWidth 输入
| 参数 | 说明 | ||||||||||||||||||||||||||||||||||||||||
|
InspectEdge |
指定对包含由InspectEdge函数返回的有效检查数据结构的电子表格单元格的引用。 |
||||||||||||||||||||||||||||||||||||||||
|
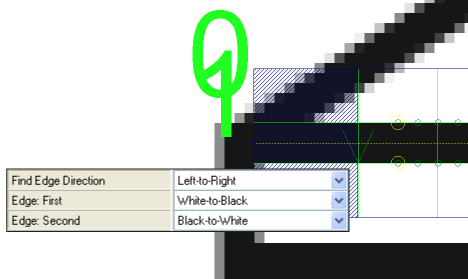
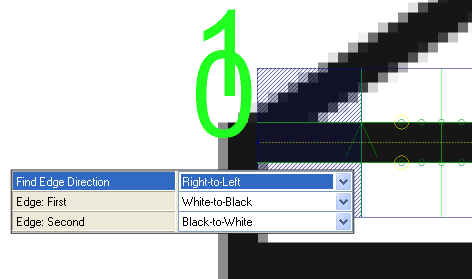
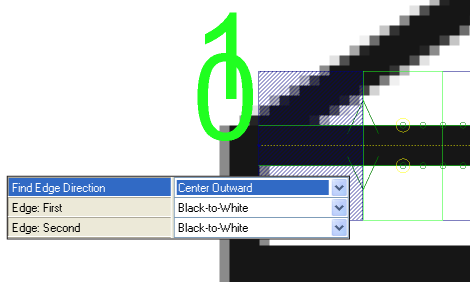
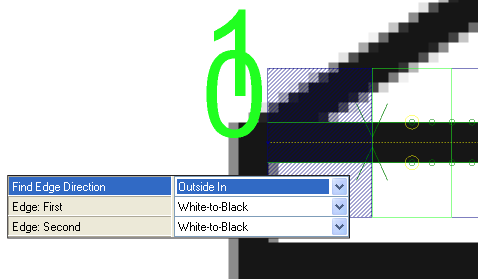
查找边缘方向 |
指定函数将尝试检测边缘的方向。添加深绿色箭头以图形方式说明检测边缘的方向。拟合线将在图像中以图形方式标记,第一条拟合线标记为 0,第二条拟合线标记为 1。 注意: 如果引用的 InspectEdge 函数的感兴趣区域 (ROI) 弯曲成曲线,则检查将相对于曲线的中心。当查找边缘方向参数设置为左到右时,它会朝向曲线中心进行检查,而当设置为右到左时,它会远离曲线的中心进行检查。
|
||||||||||||||||||||||||||||||||||||||||
|
边缘:第一 |
指定要检测的第一个边缘的对比度过渡,由查找边缘方向参数确定。
|
||||||||||||||||||||||||||||||||||||||||
|
边缘:第二 |
指定要检测的第二个边缘的对比度过渡,由查找边缘方向参数确定。
|
||||||||||||||||||||||||||||||||||||||||
|
边缘评分 |
指定将用于确定边缘是否符合既定标准的边缘评分模式。
|
||||||||||||||||||||||||||||||||||||||||
|
高级筛选 |
指定函数应如何构造线拟合。
|
||||||||||||||||||||||||||||||||||||||||
|
最大缺陷/间隙数 |
指定函数应该检测到的最大缺陷和/或间隙数(1 到 4096;默认值 = 5) 。该值分别应用于缺陷和间隙;例如,当设置为 5 时,该函数预计最多会遇到 5 个缺陷和 5 个间隙。此设置用于在电子表格中构建视觉数据访问结果表。 |
||||||||||||||||||||||||||||||||||||||||
|
缺陷 |
指定用于根据线拟合确定边缘缺陷的参数。
|
||||||||||||||||||||||||||||||||||||||||
|
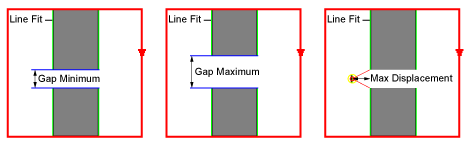
间隙 |
指定用于确定边缘对中间隙的参数。
|
||||||||||||||||||||||||||||||||||||||||
|
位置 |
指定用于确定边缘对中位置缺陷的参数。这些参数将缺陷定义为与模型路径中心的偏差,由 InspectEdgeTrainBeadPath 函数输出。这些参数仅应在引用正在引用 InspectEdgeTrainBeadPath 函数的 InspectEdge 函数时使用。
|
||||||||||||||||||||||||||||||||||||||||
|
卡尺索引 |
指定要在图像上显示的卡尺(卡尺将以绿色轮廓显示);显示的默认卡尺为 0。 |
||||||||||||||||||||||||||||||||||||||||
|
显示 |
指定图像顶部边沿图形叠加的显示模式。
|
InspectEdgeWidth 输出
|
返回 |
包含检测到的缺陷、极端和差距的 Inspect 数据结构,如果任何输入参数无效,则为 #ERR。 |
|
结果 |
在最初将 InspectEdgeWidth 插入单元格时,会在电子表格中创建结果表。 注意: 如果最大缺陷/间隙数参数的值大于零,InspectEdgeWidth 将自动插入一个结果表,其中包含最多 10 个条目,对应于数据结构中的前 10 个缺陷/间隙/边缘/边缘对。如果您希望显示更多条目,您可以通过复制最后一行并在末尾粘贴其他行来扩展表格。
|
InspectEdgeWidth 视觉数据访问函数
下面的 InspectEdge 视觉数据访问函数 自动插入到电子表格中以创建数据结构结果表:
|
标签 |
函数 |
说明 |
| 总计数 | GetTotalCount(Inspect) | 返回结果的总数。 |
| 缺陷/间隙/位置 | GetWidthCount(Inspect, 曲线/间隙/位置) | 返回指定缺陷或间隙的总数(缺陷 = 0,间隙 = 1,位置 = 2)。 |
| 缺陷/间隙/位置 | ||
| 尺寸/区域/宽度/位置 | GetDefectGapValue(Inspect, 缺陷/间隙索引, 缺陷/间隙/位置, 边缘对索引, 大小/区域/宽度) | 返回缺陷或间隙的大小、区域或宽度(缺陷 = 0,间隙 = 1,位置 = 2;大小 = 0,面积 = 1,宽度 = 2)。 |
| X | GetDefectGapBoundsX(Inspect, 缺陷/间隙索引, 缺陷/间隙/位置, 边缘对索引) | 返回缺陷边界矩形的 x 坐标。 |
| Y | GetDefectGapBoundsY(Inspect, 缺陷/间隙索引, 缺陷/间隙/位置, 边缘对索引) | 返回缺陷边界矩形的 y 坐标。 |
| 高度 | GetDefectGapBoundsHeight(Inspect, 缺陷/间隙索引, 缺陷/间隙/位置, 边缘对索引) | 返回缺陷边界矩形的高度。 |
| 宽度 | GetDefectGapBoundsWidth(Inspect, 缺陷/间隙索引, 缺陷/间隙/位置, 边缘对索引) | 返回缺陷边界矩形的宽度。 |
| 角度 | GetDefectGapBoundsAngle(Inspect, 缺陷/间隙索引, 缺陷/间隙/位置, 边缘对索引) | 返回缺陷边界矩形的角度。 |
| 曲线 | GetDefectGapBoundsCurve(Inspect, 缺陷/间隙索引, 缺陷/间隙/位置, 边缘对索引) | 返回缺陷边界矩形的曲线。 |
| 开始/结束 | GetDefectGapCaliperIndex(Inspect, 缺陷/间隙索引, 缺陷/间隙/位置, 边缘对索引, 缺陷开始/结束) | 返回缺陷开始或结束的卡尺(开始 = 0,结束 = 1)。 |
| 极限 - 最远点 1/2 | ||
| 卡尺 | GetExtremeWidth(Inspect, 最薄/最厚) | 返回包含指定极限宽度(最薄 = 0 和最厚 = 1)的卡尺索引。 |
| 宽度 | GetWidth(Inspect, 卡尺索引) | 返回索引卡尺中的边缘宽度值;如果在索引卡尺中没有找到边缘,则返回 0。 |
| X(开始和结束) | GetEdgeX(检查, 卡尺索引, 边缘对索引或边缘索引) | 返回被引用边缘的 x 坐标。 |
| Y(开始和结束) | GetEdgeY(检查, 卡尺索引, 边缘对索引或边缘索引) | 返回被引用边缘的 y 坐标。 |
- InspectEdgeWidth 的所有公式都符合以下条件:
- Inspect = InspectEdgeWidth 函数输出的 Inspect 数据结构
- 卡尺索引 = 0 到 N(卡尺总数等于 InspectedForDefect 函数引用的 InspectEdge 函数输出的卡尺数量)
- 边缘对索引 = 0 或 1
- 边索引 = 0 到 N
- 点索引 = 0 到 1
- 如果“启用位置”参数为 ON,则 InspectEdge 视觉数据访问函数 的附加部分将被插入到与位置错误相关的电子表格中。