边缘
在机器视觉术语中,边缘被定义为具有对比灰度值的两个相邻像素组之间的边界(线、弧或圆)。In-Sight 边缘工具用于检测和处理有关找到的边缘的统计信息。
什么是边缘检测
In-Sight 边缘工具函数通过检查感兴趣区域 (ROI) 中像素极性的不连续性来检测边缘,即图像中明暗(反之亦然)像素之间存在突然变化的区域。一条边缘可能只跨越两个或三个像素,或者数个像素。
边缘示例
边缘可以由单个边缘或一对边缘组成,由从暗到亮或从亮到暗的两个过渡组成。下图显示了边缘的类型:
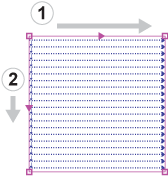
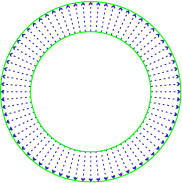
当将边缘工具(例如卡尺、FindLine或FindCircle函数)插入电子表格时,会扫描 ROI 以查找任何像素值不连续性。下图说明了矩形和环形区域扫描边缘特征的方向。在矩形区域中,扫描方向(扫描方向由两个方向箭头表示)从最左上角开始,一直到右手边的末端,然后继续图案直到它到达右下角。
扫描方向 - 矩形和环形区域
在此过程中,系统会计算 ROI 的灰度直方图,并且由高对比度(在 ROI 中发现的灰度值之间的差异)定义的区域以及满足其他指定参数的区域定义边缘。
边缘响应图(当显示参数设置为全部显示:输入、结果和图表时显示)显示在 ROI 中找到的灰度值的一阶导数;波峰和波谷代表主要的边缘过渡,如下图所示。接受阈值/最小对比度参数用于设置最小峰高(对比度阈值)。使用该集,任何低于最小峰高的波峰都将从结果中排除。这允许检查分析仅限于图像中具有一定量级的边缘。使用函数的边缘响应图来确定正确的对比度阈值。
边缘响应图示例
- 分数轴由分数(100 和 -100)和工具的接受阈值参数集定义。波峰(或正分数)表示边缘从暗过渡到亮,而波谷(或负分数)表示边缘从亮过渡到暗(分数为 0 表示未检测到边缘)。
- 偏移轴是指检测边缘特征的 ROI,其中 0 表示区域的开始,右侧的值表示区域的最大宽度(以像素为单位)。沿偏移轴的波峰或波谷的顶点表示找到的边缘在 ROI 内的位置。
边缘宽度 - 筛选边缘
边缘宽度参数用于从输入图像中去除噪声,并突出边缘轮廓的峰值。应指定边缘参数的大小,以使大小与图像中边缘的大小紧密匹配,并且波峰是尖锐和陡峭的,而不是低和渐变的。边缘的大小是边缘宽多少像素;边缘可以是尖锐的,在这种情况下,边缘只跨越一个或两个像素,或者边缘可能是暗淡的,在这种情况下,它们可能跨越几个像素。指定接近边缘尺寸的边缘宽度设置允许函数在图像中产生更强的边缘波峰。而指定的边缘宽度设置太大或太小会在图像中产生宽而低的波峰。
边缘结果
一旦定义了边缘,边缘工具函数将自动创建一个边缘数据结构和一个包含有关已定义边缘的数据的结果表。返回的信息可以被其他 In-Sight 视觉工具用作固定输入,或被其他边缘工具函数用于进一步推断边缘相关数据。
何时使用边缘工具
边缘工具应在以下情况下使用:
- 边缘在明暗像素之间具有高对比度。
- 该应用程序需要快速检测特征。例如,边缘工具是最快的 In-Sight 视觉工具之一,能够比图案更快地检测边缘特征。
为什么使用边缘工具
边缘检测和数据外推在以下应用中非常有用:
- 测量应用,例如测量垫圈等零件上圆形特征的半径,或测量电路板上电路的长度。
- 定位零件上的特征,例如圆形特征或零件的直端,用作其他 In-Sight 视觉工具的固定输入。
- 存在/不存在应用,其中边缘工具用于确定边缘特征是否存在。
- 计数和排序应用,其中边缘工具用于根据既定参数对边缘进行计数和排序。
如何使用边缘工具
边缘工具通常以下列方式使用:
- 第 1 步 - 检查图像并确定边缘工具是否满足应用的要求。
- 第 2 步 — 将卡尺、FindCircle、FindCircleMinMax、 FindCurve、FindLine、FindMultiLine 或 FindSegment 等边缘工具之一插入电子表格,并配置参数以定义和检测图像中的边缘或边缘对。
- 第 3 步 - 插入另一个边缘工具,例如 PairDistance、PairEdges、PairMaxDistance、PairMeanDistance、PairMinDistance、PairSDevDistance、PairsToEdges 或 SortEdges,以根据特定标准对找到的边缘或边缘对进行筛选、计算或排序。