VGR Sample Job with Custom View
The VGRSample_4_Features.job VGR sample job with custom view is designed for alignment of three different parts:
- TCP/IP communication is used for command communication.
- PatMax is used as a pattern finder in this sample job.
- Pattern#1 is used for Hand-eye calibration and PartID=1.
- Pattern#2 is used for PartID=2.
- Pattern#3 and Pattern#4 are used for PartID=3.
Checkerboard calibration is also included for image undistortion. To use Checkerboard calibration, run calibration on CalibrateGrid at cell A15.
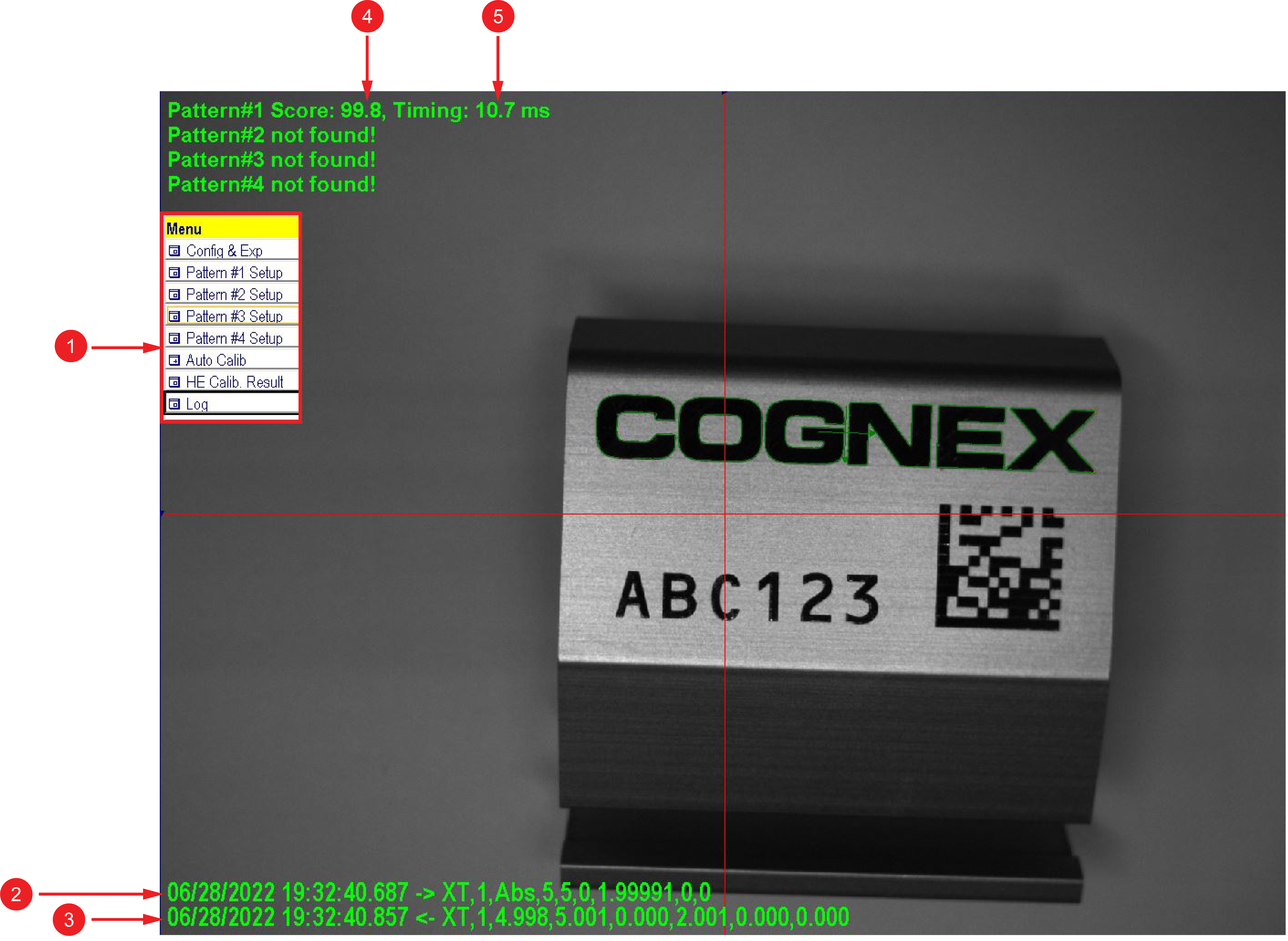
The design of the Custom View assumes the physical length unit of mm is used for robot pose in command strings:
|
|
|
|---|---|
| Number | Definition |
| 1 | Custom View |
| 2 | Received command |
| 3 | Response |
| 4 | Score of FindPatMaxPatterns |
| 5 |
Execution time of FindPatMaxPatterns |
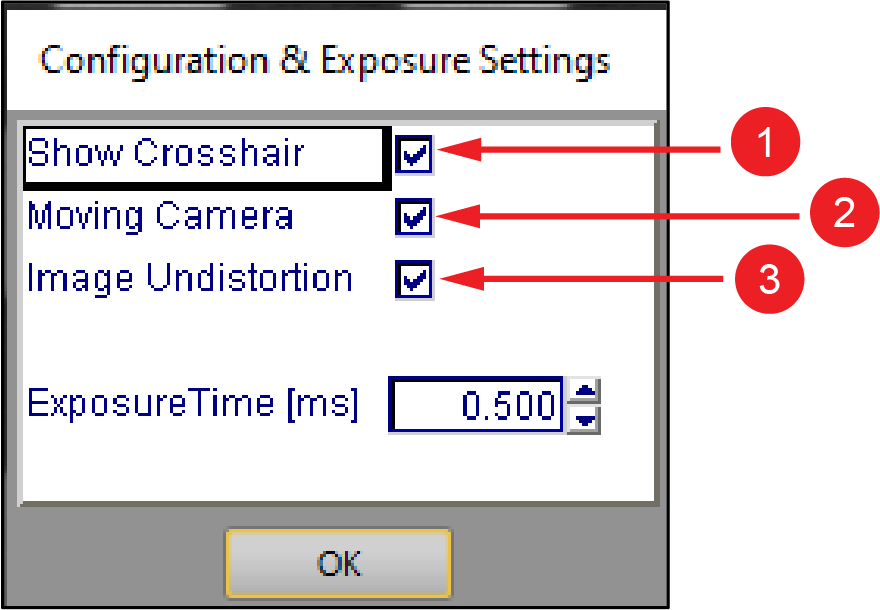
In the Custom View menu if you click on Config & Exp, Configuration & Exposure Settings opens up:
|
|
|
|---|---|
| Number | Definition |
| 1 | Shows red crosshair in the image center. |
| 2 | The MovingCam property of VGRHandEyeCalibration. |
| 3 | Turns on Image Undistortion. |
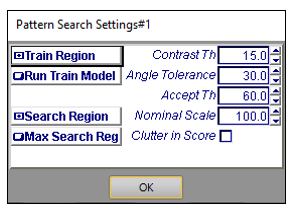
In the Custom View menu if you click on Pattern#1, Pattern#2, Pattern#3 or Pattern#4, Pattern Search Settings #1, #2, #3, or #4 opens up respectively:
In the Custom View menu if you click on Auto Calib, Translation Settings and Rotation Settings opens up:
![]()
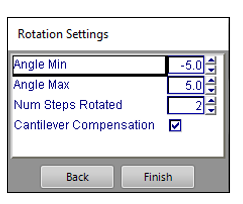
These are parameter settings for VGRHandEyeCalibration.
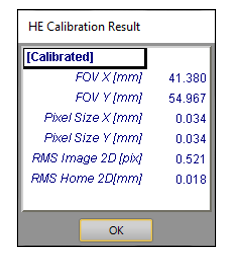
In the Custom View menu if you click on HE Calib. Result, HE Calibration Resut opens up, which shows Hand-Eye Calibration result:
In the Custom View menu if you click on Log, Log opens up, which shows the log of the command and response:
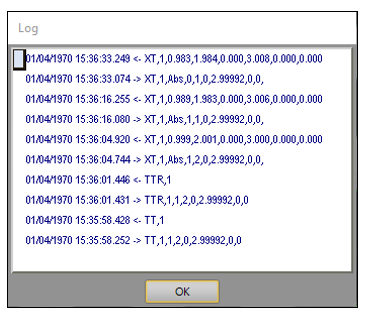
The top line is the log of the latest command and response.