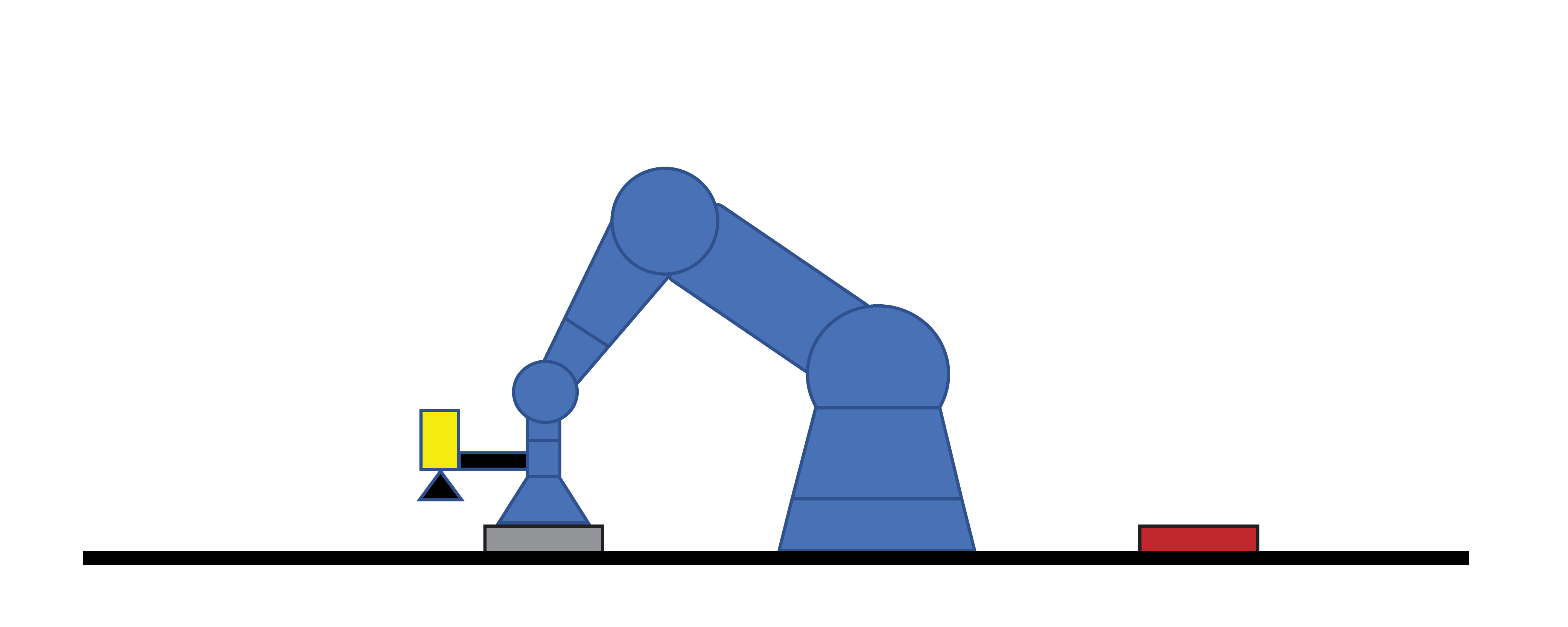
Guided Pick with Robot-Mounted Camera
System Configuration
|
Application: |
Pick Part and place it on a fixed location with identical pose. |
| Camera 1: | Mounted on the robot. | |
| PartID 1: |
Locate Part to determine the pick pose. |
|
| Prerequisites: |
|
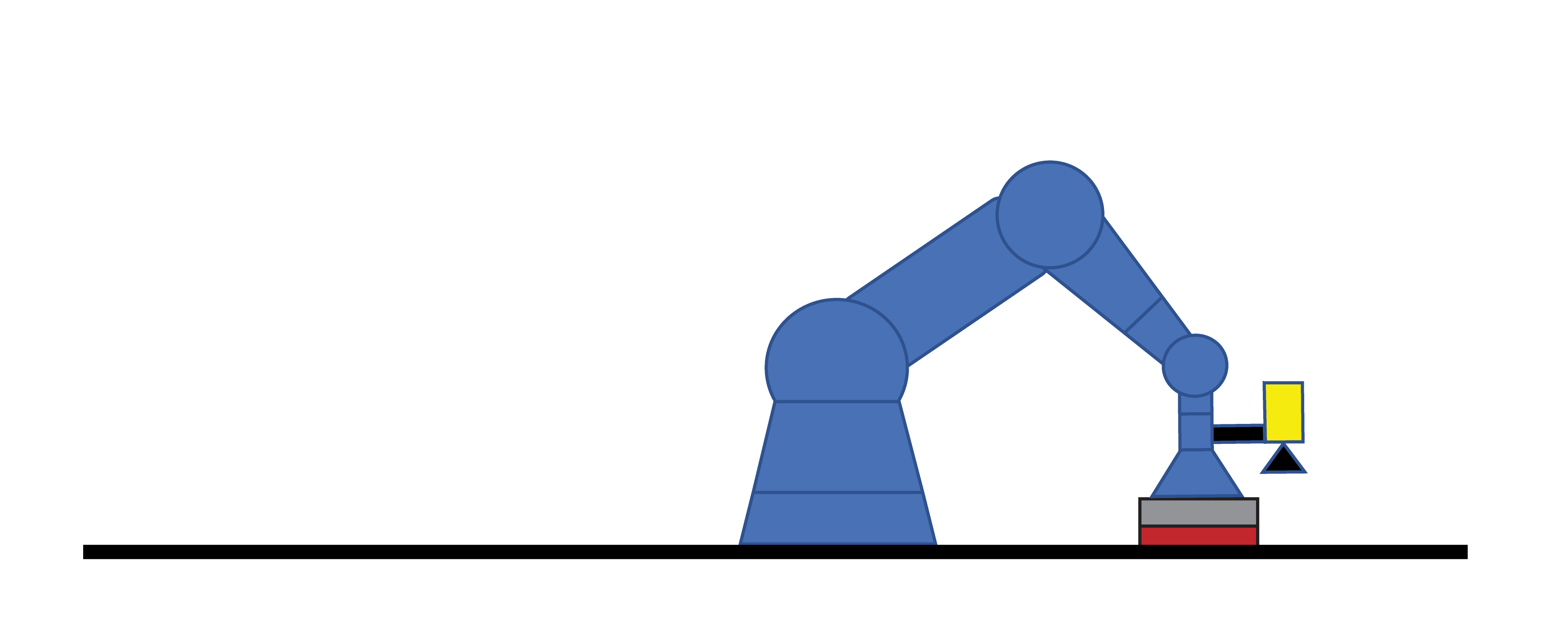
Training
-
Move the robot in the appropriate pick pose for Part.
Command: TTR,1,<current robot pose>

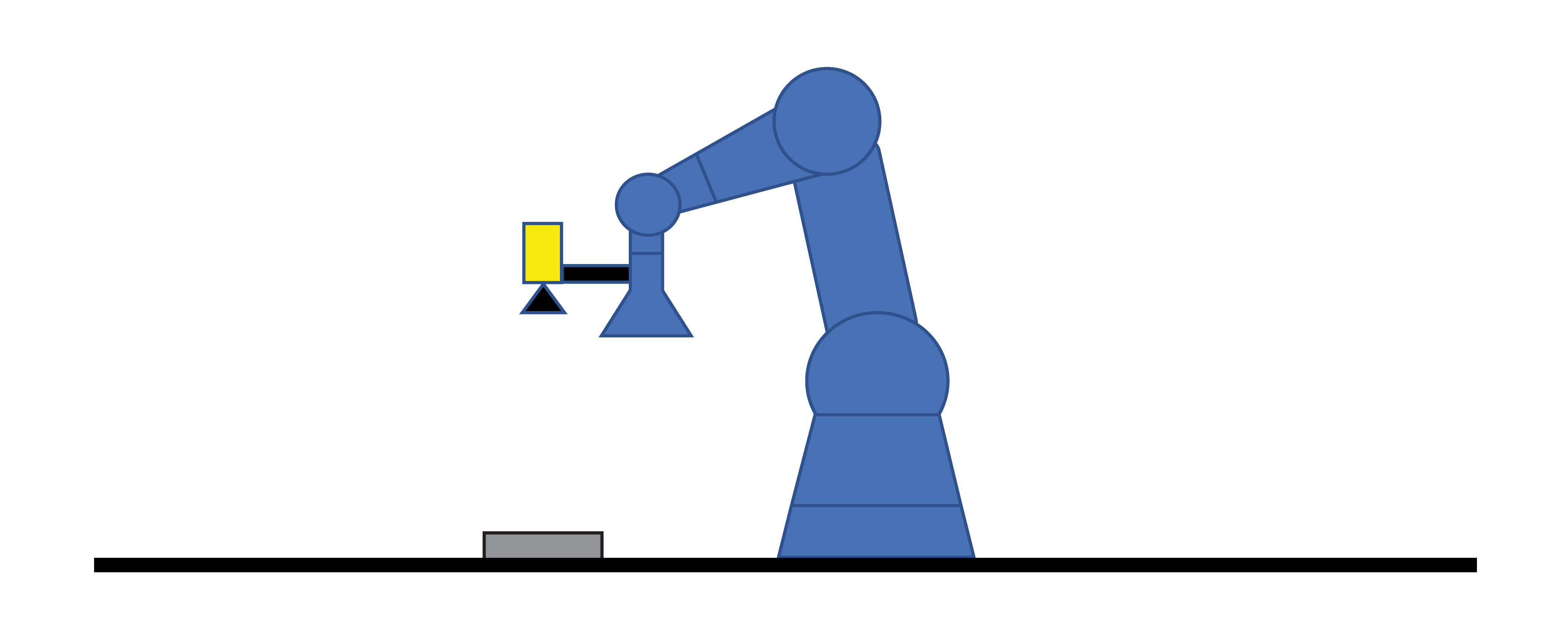
-
Release Part, which remains in place. Move to the acquisition pose for Part.
Command: TT,1,<current robot pose>
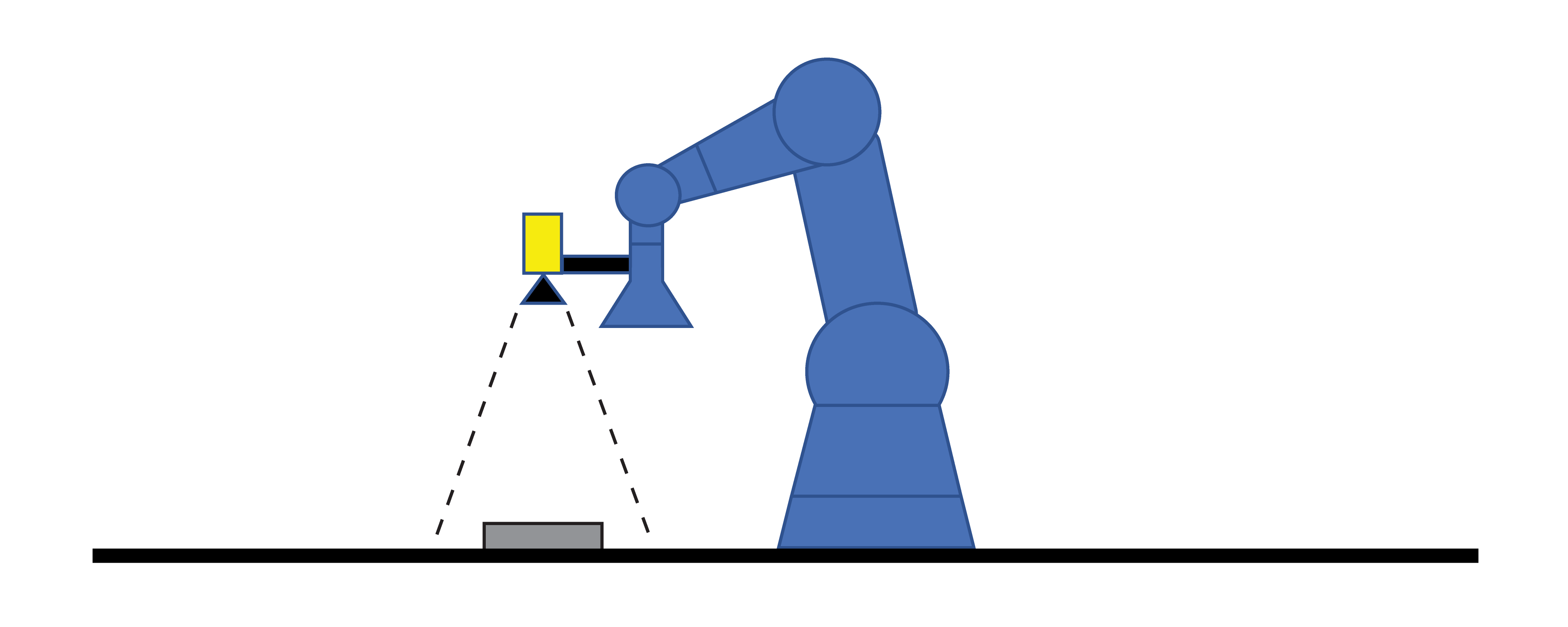
Run Time
Part is in an arbitrary run-time pose.
-
Move to the acquisition pose to locate Part.
Command: XT,1,ABS,<current robot pose>
Return string: XT,1,<run-time pick pose>
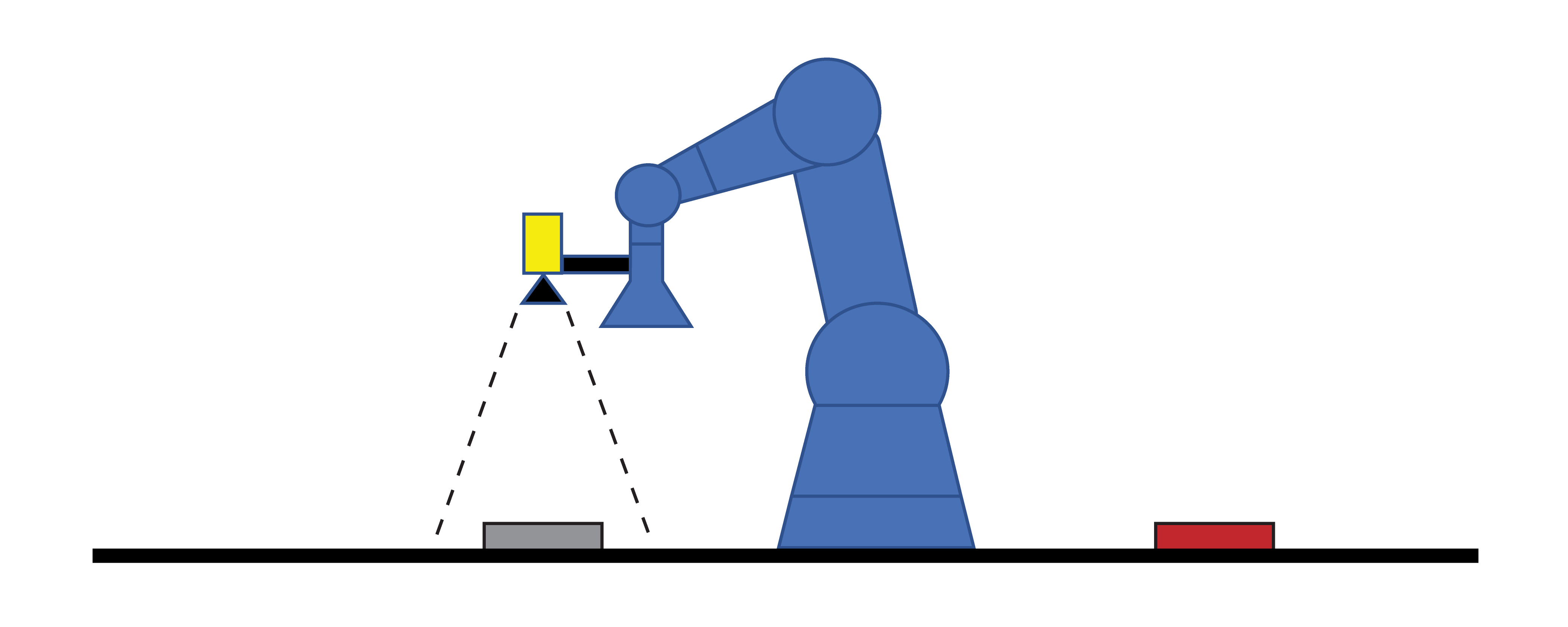
-
Move to the returned pose and pick Part.
-
Move to the fixed pose that is pre-trained on the robot controller to place Part.