3D-L4000 Series Vision System Wizard – Trigger Settings
The 3D-L4000 Series Acquisition Wizard contains the triggering settings for 3D-L4000 series vision systems on its Trigger tab. These settings allow you to configure the trigger source and the motion/direction settings of the acquisition.
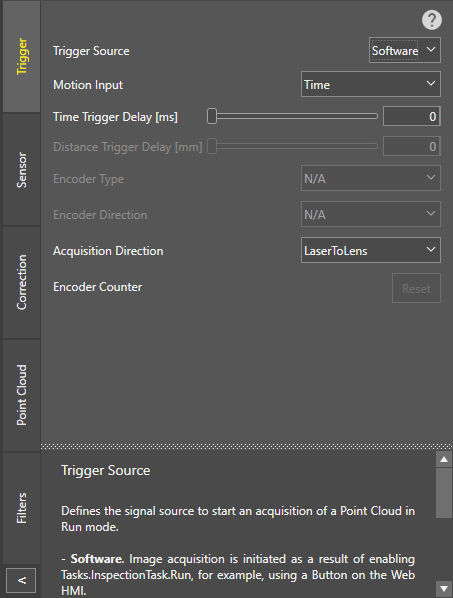
| Setting | Description |
| Trigger Source |
Specifies the trigger source for the acquisition:
|
| Motion Input |
Defines the acquisition driving logic for every profile:
Note: This setting affects field correction. Therefore, make sure to configure it before performing field correction on the device in the Correction tab.
|
| Time Trigger Delay |
Specifies a time delay (in milliseconds) between the trigger signal and the start of the acquisition. The value range is 0 – 10,000, and the default value is 0, meaning no time delay between the trigger signal and the acquisition. Note: This setting is enabled only if Motion Input is set to Time.
|
| Distance Trigger Delay |
Specifies the amount of distance (in mm) between the trigger signal and the start of the point cloud acquisition. The value range is 0 – 10,000, and the default value is 0, meaning no distance-based delay between the trigger signal and the acquisition. Note:
|
| Encoder Type |
Specifies whether the encoder signal used for acquisition is single or dual-channel:
Note: This setting affects field correction. Therefore, make sure to configure it before performing field correction on the device in the Correction tab.
|
| Encoder Direction |
Specifies how the encoder is physically connected to the vision system, affecting the motion direction that increases the Encoder Counter.
In both cases, the vision system must be static. This setting can only be configured before field correction is performed: after that, it is grayed out and can no longer be modified. Note:
Tip: Make sure that the Encoder Direction is specified correctly, based on the physical setup of the vision system. Otherwise, the generated point cloud will be mirrored along the motion direction.
|
| Acquisition Direction |
Specifies in which motion direction you want to acquire. This setting is independent of the Encoder Direction setting.
Tip: By default, you can trigger acquisitions only in one direction. If you want to trigger acquisitions in both directions (that is, both toward and away from the vision system), change the Acquisition Direction setting after performing the first acquisition.
|
| Encoder Counter |
Indicates the current encoder position so that you can check if the encoder is wired correctly and working properly. The Encoder Counter always has a positive value that you can reset with the Reset button. Note: The Encoder Counter works only if Motion Input is set to Encoder.
|