GetCellValue
指定したシンボリックタグ (EasyBuilder フィクスチャ出力、EasyBuilder の位置決めツールまたは検査ツールの結果、スプレッドシートなど) の内容を XML フォーマットで返します。
Syntax:EVGetCellValue("Symbolic Tag")
GetCellValueの入力パラメータ
| 入力 | 説明 |
|---|---|
| "Symbolic Tag" |
位置決めツールまたは検査ツールの結果などのシンボリックタグの名前 ("Distance_1.Distance"など) またはセル参照 (A4 など)。自動生成された EasyBuilder のフィクスチャ出力データの場合、名前は、通信 アプリケーションステップで選択した [デバイス] と [プロトコル] に応じて、"Job.Robot.FormatString" と "Job.FormatString" のどちらかにする必要があります。名前は引用符で囲む必要があります。 |
GetCellValueの出力
|
戻り値 |
ステータスコード。その後に文字数とセルの内容 (整数、浮動小数点値、またはテキスト文字列) が続きます。ステータスコードは次のとおりです。
|
GetCellValue例
EasyBuilder
正確な位置決めが必要とされるロボットガイダンスアプリケーションのフィクスチャデータ、または 位置決めツールまたは検査ツールの結果を取得するには:
正確な位置決めが必要とされるロボットガイダンスアプリケーションのフィクスチャ例
発行可能なコマンドは、通信の手順で選択した [デバイス] と [プロトコル] に応じて、EV GetCellValue("Job.Robot.FormatString") と EV GetCellValue("Job.FormatString") の 2 つです。
EV GetCellValue("Job.Robot.FormatString") は次の状況で使用します。
- [デバイス] の選択が [Robot] になっている。
- [デバイス] の選択が [その他] になっており、[プロトコル] で [シリアル Kuka] と [シリアル Motoman] のどちらかが選択されている。
EV GetCellValue("Job.FormatString") は次の状況で使用します。
- [デバイス] の選択が [その他] になっており、[プロトコル] で、[イーサネットネイティブ]、[シリアルネイティブ]、[シリアルテキスト] または [TCP/IP] が選択されている。
EV GetCellValue("Job.Robot.FormatString")
このコマンドを発行すると次の結果になります。
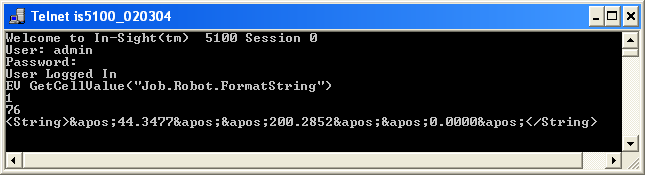
In-Sight センサは、コマンドが正常に実行されたことを示す 1 で応答します。文字数 (バイト単位) の後にセルの値 (整数、浮動小数点、またはテキスト文字列) が続きます。
EV GetCellValue("Job.FormatString")
このコマンドを発行すると次の結果になります。
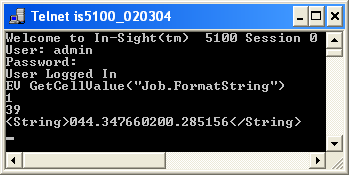
In-Sight センサは、コマンドが正常に実行されたことを示す 1 で応答します。文字数 (バイト単位) の後にセルの値 (整数、浮動小数点、またはテキスト文字列) が続きます。
位置決めツールまたは検査ツールの結果例
次の例は、距離寸法ツールの結果を取得するコマンドを発行する場合を示しています。
EV GetCellValue("Distance_1.Distance")
このコマンドを発行すると次の結果になります。
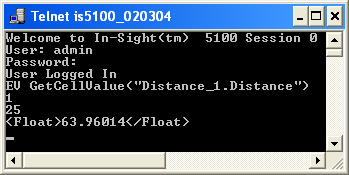
In-Sight センサは、コマンドが正常に実行されたことを示す 1 で応答します。文字数 (バイト単位) の後にセルの値 (整数、浮動小数点、またはテキスト文字列) が続きます。
スプレッドシート
スプレッドシートの特定のセルの値を取得するには、次のコマンドを発行します。
EV GetCellValue("A52")
このコマンドを発行すると次の結果になります。
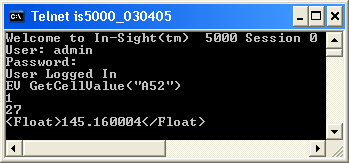
In-Sight センサは、コマンドが正常に実行されたことを示す 1 で応答します。文字数 (バイト単位) の後にセルの値 (整数、浮動小数点、またはテキスト文字列) が続きます。