FindPatMaxRedLine
登録されたパターンに基づいて、画像内の対象物を検出します。検出する対象物の登録済み (内部) 幾何学記述。FindPatMaxRedLineパターン構造体から登録されたパターンに基づいて、画像内のパターンを検出します。
- In-Sight ファームウェア 5.5.0 以降、ツールのアルゴリズムが変更され、条件によっては、より正確な結果を返すようになり、実行時間が短縮されました。
- この変更により、In-Sight ファームウェア 5.5.0 以降で作成されたこのツールを含むジョブを、ファームウェアバージョン 5.4.x 以前を搭載した In-Sight ビジョンシステムにロードしようとすると、エラーメッセージが表示されます。
- この関数は、In-Sight ファームウェア 5.1.0 以上を実行している In-Sight ビジョンシステムだけで使用できます。モデル一覧およびサポートされているファームウェアバージョンについては、「ファームウェアバージョン」を参照してください。
FindPatMaxRedLineの入力パラメータ
Syntax:FindPatMaxRedLine(画像,フィクスチャ.行,フィクスチャ.列,フィクスチャ.角度,サーチ領域.X,サーチ領域.Y,サーチ領域.高さ,サーチ領域.幅,サーチ領域.角度,サーチ領域.カーブ,外部定義領域,パターン,検出する数,アクセプトしきい値,極性を無視,精度モード,クラッタ,コントラストしきい値,許容値.開始角度,許容値.終了角度,許容値.開始スケール,許容値.終了スケール,XY のオーバーラップ,詳細設定.粗粒度パーセンテージの使用,詳細設定.粗粒度アクセプトパーセンテージ,タイムアウト,表示)
|
画像データ構造体を含んだスプレッドシートセルを参照するように指定します。デフォルトでは、このパラメータは、AcquireImage 画像データ構造体を含むセル A0 を参照しています。また、このパラメータは、ビジョンツールのグラフィックス関数や、座標補正関数により返された、そのほかの画像データ構造体も参照できます。 |
|||||||||||||
|
フィクスチャ入力、またはビジョンツール関数の画像座標系の出力に関連するサーチ領域を定義します。フィクスチャに関連する ROI を設定すると、フィクスチャが回転または移動した場合に、フィクスチャに対応して ROI を確実に回転または移動できます。 デフォルト設定は画像の左上隅で、(0, 0, 0) になります。
|
|||||||||||||
|
これは対象領域 (ROI) とも呼ばれ、解析の対象となる画像の領域を表します。変換および回転可能な矩形の画像領域を作成します。このパラメータを選択して、プロパティシートのツールバーにある [領域の最大化] ボタンを押すと、画像全体が対象になるように領域が自動的に拡張されます。
|
|||||||||||||
|
このパラメータは、Annulus、Circle、Region、EditAnnulus、EditCircle、EditCompositeRegion、EditPolygon、EditRegion、または Mask を含んだスプレッドシートセルを参照できます。このパラメータを使用すると、関数は [領域] と [フィクスチャ] の設定を無視し、参照先領域で指定された画像領域を検査します。EditCompositeRegion 関数コントロールを参照している場合は、検査領域がさまざまな形状の混合となることがあります。合成領域内の各形状は、検査領域に対して加算または減算 (マスキング) されるように割り当てることができます。 注 : このパラメータが外部定義領域の参照として設定されている場合に、この関数の内部領域を使用するには、セル参照に値 0 を入力し、このパラメータを手動で 0 に設定する必要があります。それ以外の場合、この関数は引き続き外部定義領域を参照します。
|
|||||||||||||
|
このパラメータは、TrainPatMaxRedLine 関数によって返される有効な パターン データ構造体を含むスプレッドシートのセルを参照している必要があります。 |
|||||||||||||
|
返される一致したパターンの最大数を指定します (1 ~ 1000、デフォルト = 1)。 |
|||||||||||||
|
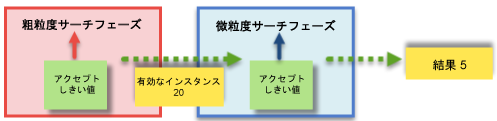
有効なインスタンスの最も低い得点である、アクセプトしきい値を指定します。一致する可能性がある得点は、アクセプトしきい値よりも大きな値である必要があります。得点がアクセプトしきい値よりも大きな値でない場合は、その一致した得点は返されません (0 ~ 100、デフォルト = 50)。 |
|||||||||||||
|
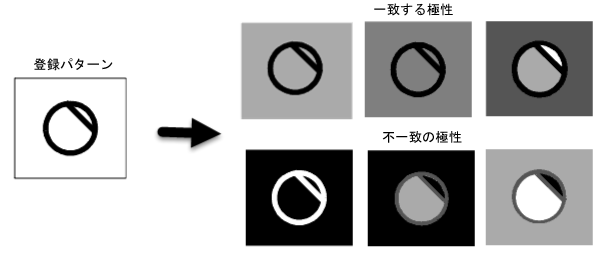
極性を無視 |
登録パターンに対して、色が反転した一致特徴を含む一致を検出可能かどうかを指定します。
極性を無視すると、PatMax が検出するパターンの種類が増加します。下記の図は、一致する極性とミスマッチの極性の例を示しています。PatMaxRedLine 関数で極性を無視するように設定した場合、図に示されているすべてのパターンが検出されます。PatMaxRedLine 関数で極性を考慮するように設定した場合は、下の行のパターンは検出されないことがあります。または、検出されても、上の行のパターンよりも低い得点が割り当てられる場合があります。
|
||||||||||||
|
精度/信頼性と実行速度の間のトレードオフを指定します。
|
|||||||||||||
|
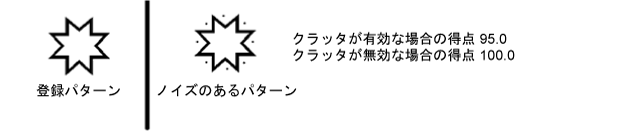
欠落している、またはふさがれているパターン特徴によって、レスポンス得点が減少するかどうかを指定します。
|
|||||||||||||
|
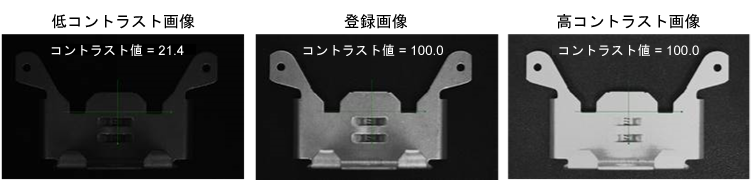
有効なインスタンスの最も低いコントラストを指定します。一致する可能性があるコントラストは、コントラストしきい値よりも大きな値である必要があります。コントラストがコントラストしきい値よりも大きな値でない場合は、その一致したインスタンスは考慮されません (0 ~ 100、デフォルト = 0)。FindPatMaxRedLineColor と FindPatMaxRedLine のコントラスト値は、登録パターン内の特徴とサーチ画像内の一致する特徴との間のコントラスト差をパーセンテージで表した、「相対」コントラストが報告されます。よって、特徴のコントラストがパターンコントラストと同じまたはより高い場合、報告されるコントラストは ~100 となります。パターンコントラストが特徴のコントラストを超えた場合、報告されるコントラストは <100 となります。 注 : FindPatMaxRedLineColor と FindPatMaxRedLine のコントラストは、FindPatMaxPatterns のコントラストとは異なります。FindPatMaxPatterns では、サーチ ROI 内の「絶対」画像コントラストがグレースケール値で報告されます。
|
|||||||||||||
|
登録されたパターンに対して回転またはスケーリングされたパターンを検出するための設定を指定します。 注 : [許容値] はハードリミットです。つまり、指定した [許容値] の範囲外で検出された結果は、スプレッドシートには返されません。
|
|||||||||||||
|
おおよそ同じ X、Y 位置にある、複数のオーバーラップしているパターン間の予想される位置の差を、登録されたパターンのサイズの割合 (%) で指定します (0 ~ 100、デフォルト = 70)。 注 : この値を高くすることによって、同じパターンが複数オーバーラップしている一致部分を検出することができます。
|
|||||||||||||
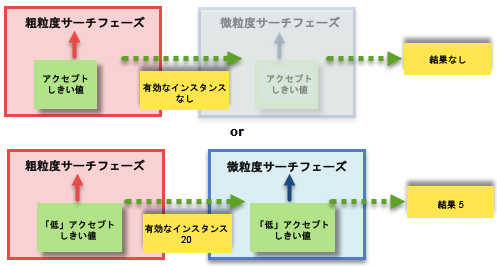
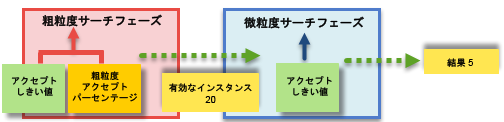
|
|
|
||||||||||||
|
関数がパターンをサーチする時間をミリ秒単位で指定します (0~30000、デフォルト = 5000、タイムアウトの無効化)。この時間が経過すると、処理は中止され、#ERR が返されます。 |
|||||||||||||
|
画像上のグラフィックスオーバーレイの表示モードを指定します。
|
FindPatMaxRedLine出力
| 戻り値 | 得点によってソートされたモデルとパターンレスポンスのリストを含むパターンデータ構造体。入力パラメータが無効である場合、または一致パターンが検出されない場合は #ERR を返します。 |
| 結果 | 初めてFindPatMaxRedLineセルに挿入すると、スプレッドシートに結果テーブルが作成されます |
FindPatMaxRedLineデータアクセス関数
次のデータアクセス関数がスプレッドシートに自動挿入され、結果テーブルが作成されます。
| 行 | GetRow(パターン, インデックス) | パターン位置の行座標 |
| 列 | GetCol(パターン, インデックス) | パターン位置の列座標 |
| 角度 | GetAngle(パターン, インデックス) | パターン位置の角度 |
| スケール | GetScale(パターン, インデックス) | 登録されたモデルと比較したパターンのサイズ (モデルサイズのパーセントで表示) |
| 得点 | GetScore(パターン, インデックス) | パターンのレスポンス得点 |