SetSystemConfig
These parameters are used in conjunction with the SetSystemConfig Evaluate Native Mode command to configure system parameters.
Active Cells Limit
Configures the number of available spreadsheet cells settings that are found in the Active Cells Limit dialog. For more information, see Active Cells Limit Dialog.
Inputs
Syntax: EV SetSystemConfig("ActiveCellLimit",Limit,WriteProcSet)
|
Parameter |
Description |
|---|---|
|
References the Active Cells Limit dialog settings. |
|
|
The active cell limit, in units of cells. 2048 to 10400, 6144 (default) Note: The active cell limit for the In-Sight 5000 vision system is 4,096 cells and cannot be modified.
|
|
|
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Example
To specify an active cell limit of 8,192, issue the following command: EV SetSystemConfig("ActiveCellsLimit",8192,1)
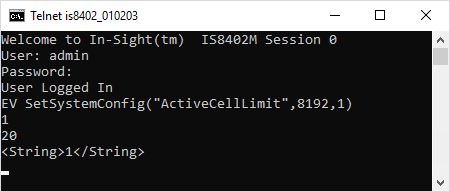
The In-Sight vision system responds with a status code (1), followed by the number of characters, in bytes (20). Finally, a result code is returned that either contains a 1, indicating that the limit was set, or a 0, indicating the limit was not set. The In-Sight vision system must be power cycled for the changes to take effect.
DHCP Timeout
Configures the DHCP Timeout settings that are found in the Network Settings dialog. For more information, see Network Settings Dialog.
Inputs
Syntax: EV SetSystemConfig("DHCPTimeout",Timeout,WriteProcSet)
Parameter | Description |
|---|---|
References the DHCP Timeout settings. | |
(5 to 180), 60 (default) | |
|
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Example
To specify a DHCP Timeout of 30 seconds, issue the following command: EV SetSystemConfig("DHCPTimeout",30,1)
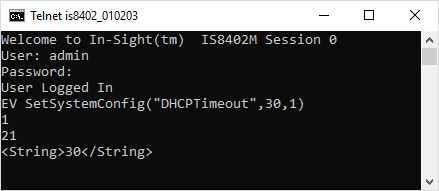
The In-Sight vision system responds with a status code (1), followed by the number of characters, in bytes (21). Finally, the DHCP Timeout setting (30) is returned.
Telnet Port
Configures the Telnet Port settings that are found in the Network Settings dialog. For more information, see Network Settings Dialog.
Inputs
Syntax: EV SetSystemConfig("TelnetPort",Port,WriteProcSet)
Parameter | Description |
|---|---|
References the Telnet Port Settings. | |
1 to 65535, 23 (default) | |
1 = Settings are saved in the proc.set file. The settings persist after the In-Sight vision system is power cycled. |
- A valid port assignment is any unused number between 1 and 65535, excluding 21, 68, 80, 502, 1069, 1070, 1212, 2222, 44818 and 50000 (reserved for In-Sight communications). For more information, see In-Sight Ports.
- The vision system must be rebooted before the Telnet Port settings take effect.
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Example
To specify a Telnet Port of 2000, issue the following command: EV SetSystemConfig("TelnetPort",2000,1)
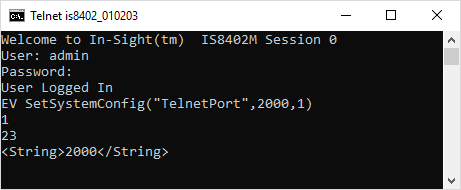
The In-Sight vision system responds with a status code (1), followed by the number of characters, in bytes (23). Finally, the Telnet Port setting (2000) is returned.
Network Requested Link Mode
Configures the Link Speed setting found in the Network Settings dialog. After the command is issued, the vision system must be rebooted for the changes to take effect. For more information, see Network Settings Dialog.
Inputs
Syntax: EV SetSystemConfig("Network.RequestedLinkMode",LinkSpeed,WriteProcSet)
- The 1000 Mbps Full Duplex option is only available for vision systems that support 1000 Mbps Ethernet speeds. For In-Sight 5600 series vision systems, it is only available on models with 128MB non-volatile flash memory or higher.
- Use the GetSystemConfig command to determine the link speeds and duplex modes supported by the vision system. For more information, see GetSystemConfig.
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Example
To configure the vision system to use 100 Mbps Full Duplex, issue the following command: EV SetSystemConfig("Network.RequestedLinkMode",103,1)
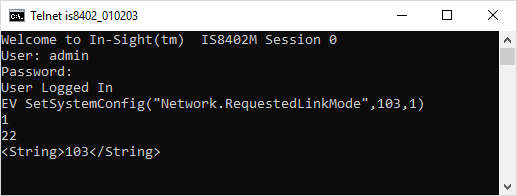
The In-Sight vision system responds with a status code (1), followed by the number of characters, in bytes (22). Finally, the current link speed (103)is returned.
Live Image
Configures the Live Acquisition settings that are found in the Image Settings dialog. For more information, see Image Settings Dialog.
Inputs
Syntax: EV SetSystemConfig("LiveImage",Resolution,MaxFrameRate)
Parameter | Description |
|---|---|
References the LiveImage settings. | |
| |
0.016 to 100, 0 (default) |
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Example
To configure the vision system to use half resolution for live images with a maximum rate of 0.064 frames/sec, issue the following command: EV SetSystemConfig("LiveImage",1,0.064)
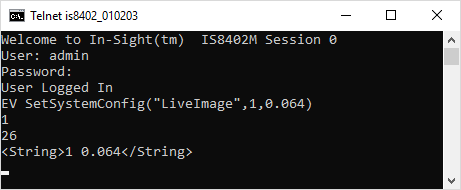
The In-Sight vision system responds with a status code (1), followed by the number of characters, in bytes (26). Finally, the Live Acquisition settings (1 0.064) are returned.
Online Image
Configures the Online Resolution settings that are found in the Image Settings dialog. For more information, see Image Settings Dialog.
- For vision system running In-Sight firmware 4.x.x, Optimized returns a full size image with a Manual trigger, and a half resolution image with a Camera or Continuous trigger. For vision systems running In-Sight firmware 5.1.0 and later, Optimized optimizes the resolution of the image sent to In-Sight Explorer for speed.
- The Eighth resolution option is not supported for color vision systems.
Inputs
Syntax: EV SetSystemConfig("OnlineImage",Resolution,MaxFrameRate)
Parameter | Description |
|---|---|
References the OnlineImage settings. | |
| |
0.016 to 100, 0 (default) |
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Example
To configure the vision system to use half resolution for Online images with a maximum rate of 0.064 frames/sec, issue the following command: EV SetSystemConfig("OnlineImage",2,0.064)
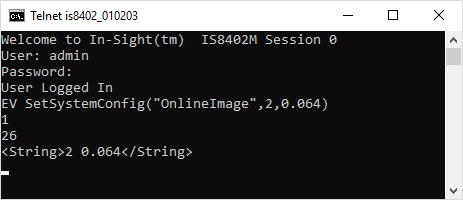
The In-Sight vision system responds with a status code (1), followed by the number of characters, in bytes (26). Finally, the Live Acquisition settings (2 0.064) are returned.
Services Enabled
Configures the Protocol Services settings that are found in the Network Settings dialog. For more information, see Network Settings Dialog.
Inputs
Syntax: EV SetSystemConfig("ServicesEnabled",Services,Mask)
Parameter | Description | |||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
References the ProtocolServices settings. | ||||||||||||||||||||||||||||
Specifies all services to be enabled on the vision system. The Services parameter is a binary value that is converted into its decimal equivalent.
To enable more than one service, determine the binary value for the
enabled services , then convert the value to its decimal equivalent. | ||||||||||||||||||||||||||||
Specifies the services to be modified on the vision system. The Mask parameter is a binary value that is converted into its decimal equivalent.
To modify
more than one service, determine the binary value for the services to
be modified, then convert the value to its decimal equivalent. |
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Examples
To Enable and Modify a Single Service
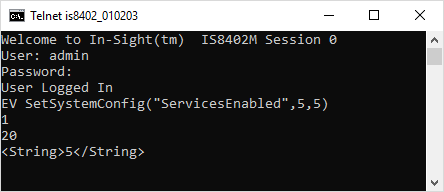
If no services are currently enabled, and you want to enable the ProfiNET service. Issue the following command: EV SetSystemConfig("ServicesEnabled",4,4)
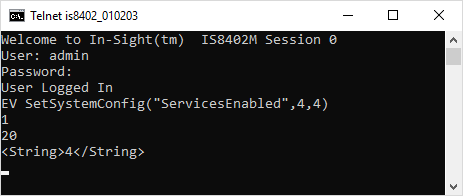
The In-Sight vision system responds with a status code (1), followed by the number of characters, in bytes (20). Finally, the enabled service(s) (4) are returned.
Disable All Services
Since we want all services to be disabled, we know that the Service parameter is 0.
Determine the binary value used to modify the services.
Service
ProfiNET
EtherNet/IP
Modbus
Binary
1
1
1
Convert the binary value to its decimal equivalent. This gives you the Mask parameter value
111 = 7
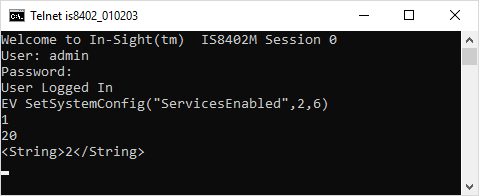
Issue the following command: EV SetSystemConfig("ServicesEnabled",0,7)
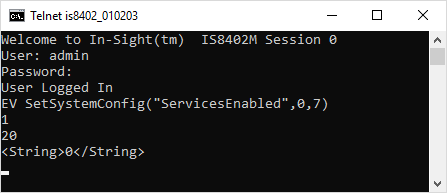
The In-Sight vision system responds with a status code (1), followed by the number of characters, in bytes (20). Finally, the enabled service(s) (0) are returned.
Audit Enable Settings
Enables or disables automatic audit messages for the active vision system and specifies the types of events for which audit messages will be generated. For more information, see Audit Message Settings Dialog.
Inputs
Syntax: EV SetSystemConfig("AuditEnableSettings",Enabled,SystemEvents,TaggedCells,SystemSettings,WriteProcSet)
Parameter | Description |
|---|---|
References the Audit Enable Settings. | |
| |
| |
| |
| |
|
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Example
To enable audit messages for the active vision system. generate audit messages when system settings are changed, and save the settings to the proc.set file, issue the following command: EV SetSystemConfig("AuditEnableSettings",1,0,0,1,1)
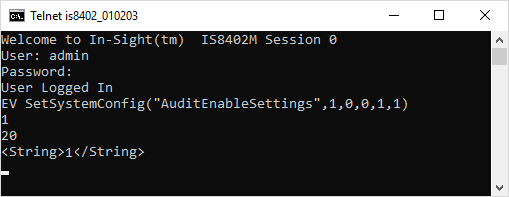
The In-Sight vision system responds with a status code (1), followed by the number of characters, in bytes (20). Finally, the results are returned in XML format.
Audit IP Settings
Specifies the IP address and TCP/IP port of the audit message server. For more information, see Audit Message Settings Dialog.
Inputs
Syntax: EV SetSystemConfig("AuditIPSettings","IPAddress",Port,WriteProcSet)
Parameter | Description |
|---|---|
References the Audit IP Settings. | |
| Specifies the IP address of the audit message server. | |
| Specifies the TCP/IP port of the audit message server. (default = 5753) Note: A valid port assignment is any unused number between 1 and 65535, except
for ports reserved for In-Sight communications. For more information, see In-Sight Ports. | |
|
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Example
To specify the IP address and TCP/IP port of the audit message server and save the settings to the proc.set file, issue the following command: EV SetSystemConfig("AuditIPSettings","192.168.0.13",5753,1)
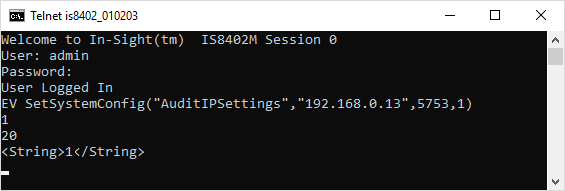
The In-Sight vision system responds with a status code (1), followed by the number of characters, in bytes (20). Finally, the results are returned in XML format.
Trigger Timestamp Mode
Enables the legacy mode for single timestamp user data format and triggering. You only need to issue this command if migrating from a vision system running 4.5.0 – 4.10.x firmware to a vision system running 5.6.1 firmware or later and need to reuse the existing PLC logic.
Inputs
Syntax: EV SetSystemConfig("Eip.TriggerTimestampLegacyMode",TriggerMode)
Parameter | Description |
|---|---|
Sets whether to use In-sight firmware version 4.x.x mode of single triggering or the In-Sight firmware version firmware 5.6.1 mode of single and multiple timestamp triggering. | |
|
Trigger Timestamp (Single and Multiple Triggers)
If an In-Sight vision system is configured to communicate over CIP-Sync and the Precision Time Protocol (PTP), the SetSystemConfig command is used to set the system configuration variable, "EIP.TriggerTimestampInputOffset", to the offset in the user data field, where the PLC writes the timestamps.
Inputs
Syntax: EV SetSystemConfig("Eip.TriggerTimestampInputOffset",Offset)
Parameter | Description |
|---|---|
Sets the offset into the EtherNet/IP output assembly, which is used to trigger the vision system. If you are running In-Sight firmware version 4.x.x, this captures the 64-bit timestamp in microseconds, followed by a 64-bit system time offset in microseconds (for a total of 16 bytes), which is used to trigger the vision system. If you are running In-Sight firmware version 5.6.1, this captures the 64-bit system time offset in microseconds, followed by the 64-bit timestamps in microseconds. | |
| 0 (default) to 488 (or less depending on the number of timestamps sent) . To disable the setting, set the value to -1. |
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Trigger Timestamp: Number of Inputs (Multiple Triggers)
Sets the number of timestamps the vision system can process simultaneously from one PLC user data packet. The PLC can send a maximum of four timestamps.
Inputs
Syntax: EV SetSystemConfig("Eip.TriggerTimestampNumInputs",Timestamps)
Parameter | Description |
|---|---|
Sets the number of timestamps the vision system can process simultaneously from one PLC user data packet. | |
| 1 to 4. Default is 4. |
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Trigger Timestamp: Maximum Queue Length (Multiple Triggers)
Sets the maximum number of pending time triggers that the vision system can store simultaneously.
Inputs
Syntax: EV SetSystemConfig("Eip.TriggerTimestampMaxQueueLength",Timestamps)
Parameter | Description |
|---|---|
Sets the maximum number of timestamps that the vision system can store simultaneously. | |
| 1 to 10. Default is 10. |
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Trigger Timestamp: Override Window (Multiple Triggers)
Sets the number of microseconds that a pending PLC time stamp has to fall within before it can override an existing timestamp on the vision system.
Inputs
Syntax: EV SetSystemConfig("Eip.TriggerTimestampOverrideWindowUs",Microseconds)
Parameter | Description |
|---|---|
Sets the number of microseconds that a pending PLC timestamp has to fall before it can override an existing timestamp on the vision system. | |
| 0 to 10,000. Default is 1,000. |
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Increase Image Buffers
Allows the default number of image buffers allocated to an In-Sight vision system to be increased, based on the vision system resolution and RAM size. After issuing the command, the vision system must be power cycled for the changes to take effect. For more information, see Image Buffers Dialog.
Inputs
Syntax: EV SetSystemConfig("StartupImageBuffers",NumberofBuffers,WriteProcSet)
Parameter | Description |
|---|---|
Sets the number of image buffers that will be allocated to the vision system at startup. | |
Specifies the number of buffers that will be allocated to the vision system. Note: If NumberofBuffers is set to 0, the default number of buffers will be used. | |
|
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Adjust ExtractBlobs Memory Allocation
Allows the memory allocation for the ExtractBlobs function to be set manually. When using this setting, the value specified should be no more than half the number of pixels in the ExtractBlobs function's region of interest (ROI). For more information, see ExtractBlobs.
Inputs
Syntax: EV SetSystemConfig("ExtractBlobsMemory",k)
Parameter | Description |
|---|---|
Sets the amount of memory that will be allocated to the vision system at startup for the ExtractBlobs function. | |
Specifies the amount of memory that will be allocated to the vision system for the ExtractBlobs function; the value of “k” depends upon the size of the ROI being used, as well as the quality of the image. Begin with a smaller value, and then increment above that value. For example, with a ROI <= 640 x 480 and a speckled image, begin with a value of 8,000 and increment the value by 1,000; with a ROI <= 1600 x 1200, begin with a value of 32,000 and increment the value by 1,000; or with a ROI <= 2448 x 2048, begin with a value of 128,000 and increment the value by 1,000. Note: To restore the default memory allocation for ExtractBlobs, enter 0. |
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Default Focus Position
Allows the In-Sight 7000 series vision system to save a focus position in the vision system's proc.set file.
Inputs
Syntax: EV SetSystemConfig("DefaultFocusPosition",Position,Apply,WriteProcSet)
Parameter | Description |
|---|---|
Sets the default focus position that the vision system will use at startup. | |
| Specifies the default focus position, 0 to 100; to disable this setting, set the variable to -1. | |
| |
|
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Strobe Start Position
Configures the Strobe Start Position setting that are found in the Output Details dialog. For more information, see Configure Discrete Output Details.
Inputs
Syntax: EV SetSystemConfig("StrobeStartPosition",Position,WriteProcSet)
Parameter | Description |
|---|---|
Specifies when the strobe should begin. | |
Note: If using a strobe with the In-Sight 8405 vision system, a minimum Exposure value of 72ms is recommended for a full frame image capture, to ensure that all pixel rows are exposed when the strobe is pulsed. For more information, see In-Sight 8405 Rolling Shutter Operation. | |
|
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Example
To specify that the strobe will begin as the In-Sight vision system begins its acquisition, issue the following command: EV SetSystemConfig("StrobeStartPosition",0,1)
The In-Sight vision system responds with a status code (1), followed by the number of characters, in bytes (20). Finally, the results are returned in XML format.
PulseJobChangeTiming
Specifies the widths of the input pulses for changing the job on the In-Sight 2000 series sensor via discrete input line 0, when configured as a Job Change (Pulsed) signal type. The job change is initiated based on the detection of input pulses, differentiated by the width of the pulses. The pulses are generated by an external device (such as a PLC), and sent to the In-Sight 2000 sensor. First, the external device issues a start pulse. Next, the external device issues count pulses, with a pulse gap between each count pulse. Finally, the external devices issues a stop pulse. When all pulses and pulse gaps match the specified pulse lengths, the job change request is successful and the job is loaded to the sensor. If any of the conditions fail (i.e., an incorrect pulse or incorrect pulse gap timing), the job change request will fail and no job change will take place.
Inputs
Syntax: EV SetSystemConfig("PulseJobChangeTiming",StartPulse,StopPulse,CountPulse,PulseGap,Tolerance,WriteProcSet)
Outputs
Returns a status code, followed by the number of characters (in bytes) for the results, then the results in XML format. The status codes are:
| Status Codes | Description |
|---|---|
| 1 | The command was executed successfully. |
| 0 | Unrecognized command. |
| -2 | The command could not be executed. |
| -6 | User does not have Full Access to execute the command. For more information, see User Access Settings Dialog. |
Examples
Specify Pulse Width Values
To specify the pulse job change timing and save the settings to the proc.set file, issue the following command:
EV SetSystemConfig("PulseJobChangeTiming",15000,15000,10000,1000,100,1)
The In-Sight sensor responds with a status code (1), followed by the number of characters, in bytes (20). Finally, the results are returned in XML format.
Retrieve Current Pulse Width Values
To retrieve the current pulse width values, issue the following command: EV SetSystemConfig("PulseJobChangeTiming")
The In-Sight sensor responds with a status code (1), followed by the number of characters, in bytes (45). Finally, the results are returned in XML format.