SetDiscreteOutput
[ディスクリート I/O の設定] ダイアログおよび [出力の詳細設定] ダイアログの設定を行います。
- このコマンドを実行する際には、In-Sight ビジョンシステムはオフラインになっている必要があります。
- In-Sight 70xx - 74xx シリーズ上でシリアル通信を有効にするには、ブレークアウトケーブルを使用するか、CIO-MICRO または CIO-MICRO-CC I/O モジュールを使用します。 ブレークアウトケーブルに接続している場合 (I/O モジュールに接続されていない場合)、ディスクリート入出力ライン (各 1) をシリアル受信およびシリアル送信に設定することができます。
- In-Sight ビジョンシステムを CIO-1400 または CIO-1450 I/O モジュールとともに使用する場合、シリアルポート経由でディスクリート出力設定を変更するために、SetDiscreteOutput または SetDiscreteOutputDelay コマンドを使用しないでください。使用した場合、ビジョンシステムが応答しなくなる場合があります。変更を行う場合、または Telnet 経由でコマンドを送信するには、[ディスクリート I/O 設定] ダイアログと [出力詳細] ダイアログを使用します。
-
Store Settings (TS) ネイティブモードコマンドを使用して proc.set ファイルに変更を保存します。proc.set ファイルに保存しないと、In-Sight ビジョンシステムの電源を入れ直したときに変更が失われます。
SetDiscreteOutputの入力パラメータ
Syntax:EVSetDiscreteOutput(LineID,"Name",Type,Pulse,PulseLen,Delay)
| 入力 | 説明 | |||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| LineID |
In-Sight Micro 1000 シリーズ、In-Sight 5000 シリーズ、In-Sight Micro 8000 シリーズ:
|
|||||||||||||||||||||||||||||||||||||||||||
|
In-Sight 70xx ~ 74xx シリーズ:
|
||||||||||||||||||||||||||||||||||||||||||||
|
In-Sight 76xx ~ 79xx シリーズ:
|
||||||||||||||||||||||||||||||||||||||||||||
| "Name" |
出力ラインの名前。 注 : 入力する "Name" は、引用符で囲む必要があります。
|
|||||||||||||||||||||||||||||||||||||||||||
| Type | 0 = ユーザ用* | |||||||||||||||||||||||||||||||||||||||||||
|
1 = 高 |
||||||||||||||||||||||||||||||||||||||||||||
| 2 = 低 | ||||||||||||||||||||||||||||||||||||||||||||
| 3 = 画像取り込み開始 | ||||||||||||||||||||||||||||||||||||||||||||
| 4 = 画像取り込み終了 | ||||||||||||||||||||||||||||||||||||||||||||
| 5 = ジョブ完了 | ||||||||||||||||||||||||||||||||||||||||||||
| 6 = システムビジー | ||||||||||||||||||||||||||||||||||||||||||||
| 7 = ジョブを開く - 完了 | ||||||||||||||||||||||||||||||||||||||||||||
| 8 = ジョブを開く - エラー | ||||||||||||||||||||||||||||||||||||||||||||
| 9 = ERR: 画像取り込み失敗 | ||||||||||||||||||||||||||||||||||||||||||||
| 10 = ERR: トラックオーバラン | ||||||||||||||||||||||||||||||||||||||||||||
| 11 = ERR: トラックキューフル | ||||||||||||||||||||||||||||||||||||||||||||
| 12 = オンライン/オフライン | ||||||||||||||||||||||||||||||||||||||||||||
|
13 = ストロボ
|
||||||||||||||||||||||||||||||||||||||||||||
| 14 = I/O モジュールスタンバイ (CIO-1450 および CIO-1460 のみ。LineID = 0 ~ 7 の場合のみ有効) | ||||||||||||||||||||||||||||||||||||||||||||
| 15 = 照明制御 (CIO-1460 のみ。LineID = 9 の場合のみ有効) | ||||||||||||||||||||||||||||||||||||||||||||
| 17 = ライフライン (CIO-MICRO および CIO-MICRO-CC のみ) | ||||||||||||||||||||||||||||||||||||||||||||
| 18 = Waveform | ||||||||||||||||||||||||||||||||||||||||||||
|
20 = シリアル送信 (直接接続 I/O のみ。LineID = 1 の場合のみ有効) 注 :
|
||||||||||||||||||||||||||||||||||||||||||||
| 24 = ジョブの PASS/FAIL セル | ||||||||||||||||||||||||||||||||||||||||||||
| Pulse |
0 = レベル出力 注 : Type が 13 (Strobe) に設定され、Pulse が 0 に設定されている場合、[ストロボ/照明制御のトリガ] 設定は [立ち上がりエッジ] に設定されます。
|
|||||||||||||||||||||||||||||||||||||||||||
|
1 = パルス出力 注 : Type が 13 (Strobe) に設定され、Pulse が 1 に設定されている場合、[ストロボ/照明制御のトリガ] 設定は [立ち下がりエッジ] に設定されます。
|
||||||||||||||||||||||||||||||||||||||||||||
| PulseLen |
出力パルスの持続時間。
|
|||||||||||||||||||||||||||||||||||||||||||
| Delay |
(0 ~ 1000) |
|||||||||||||||||||||||||||||||||||||||||||
| * はデフォルト値を示します。 | ||||||||||||||||||||||||||||||||||||||||||||
SetDiscreteOutputの出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
SetDiscreteOutput例
例 1: [ジョブを開く - 完了] タイプ設定
以下の設定を行うには
LineID: 3
"Name": "LINE3"
Type: ジョブを開く - 完了
Pulse: レベル出力
PulseLen: 250 ms
Delay: 50
次のコマンドを発行します。EV SetDiscreteOutput(3,"LINE3",7,0,250,50)
In-Sight センサは、ステータスコード (1) と、その後にバイト単位の文字数 (18) を続けて返して応答します。最後に、結果が XML フォーマットで返されます。
例 2: [ストロボタイプ] 設定
[ストロボタイプ] の設定を行うには:
LineID: 1
"Name": "LINE1"
Type: ストロボ
[ストロボ/照明制御のトリガ]: 立ち上がりエッジ
PulseLen: 10 ms
Delay: 50
次のコマンドを発行します。EV SetDiscreteOutput(1,"LINE1",13,0,10,50)
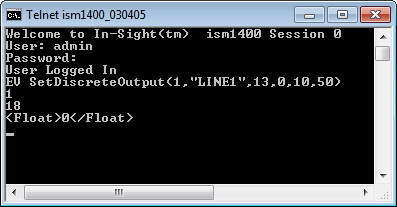
In-Sight センサは、ステータスコード (1) と、その後にバイト単位の文字数 (18) を続けて返して応答します。最後に、結果が XML フォーマットで返されます。