Line Scan Controls
Line Scan Controls
The Line Scan controls allow you to configure the settings for your In-Sight 5604 or 9902L line scan vision system. The line scan vision system assembles an image row by row as the target object passes beneath it. This allows for the construction of full, "unwrapped" images of cylindrical objects or sliced, continuous images of a surface. With a user-provided encoder, the line scan vision system provides high-precision images despite target speed variability.
- You must be connected to an In-Sight 5604 or 9902L line scan vision system or emulator to enable these controls.
- The user must have their access level set to Full Access to configure the settings.
- The line scan vision system must be Offline.
-
Trigger: Defines the source of the image acquisition trigger when the line scan vision system is Online.
- Camera (default): Enables image acquisition on a rising edge sensed at the vision system's dedicated acquisition trigger input.
- Continuous: Enables "free running" (as fast as possible) image acquisitions.
-
External: Enables image acquisition on either a serial command or on the rising edge applied to a discrete input bit configured as an Acquisition Trigger.
Note:- Faster trigger rates can be achieved by using the vision system's built-in acquisition trigger input (by setting the Trigger to Camera) versus triggering the vision system with a general-purpose input line configured as an Acquisition Trigger (by setting the Trigger to External).
- If the Trigger parameter is set to External and an acquisition is missed, the ERR: Missed Acquisition output will not be sent from the vision system; the ERR: Missed Acquisition signal is only supported when the Trigger parameter is set to Camera.
- Manual: Enables image acquisition when pressing F5.
- Industrial Ethernet:
-
Timestamp: Enables image acquisition when a timestamp trigger is sent to the vision system from a PLC over EtherNet/IP. The Timestamp option is only supported with the following vision systems:
-
In-Sight 5000 series vision systems with 128MB non-volatile flash memory and running firmware version 4.5.0 or later
Note: The In-Sight 5605 vision system (Hardware Type 821-0032-1R), In-Sight 5705 vision system and In-Sight 5705C vision systems are not supported. - In-Sight 7000 Gen2 series vision systems
- In-Sight 9000 series vision systems
-
-
Line Delay (lines): Defines the number of lines to delay after the camera trigger occurs before starting an image acquisition.
Note: The Trigger parameter must be set to Camera to enable this control. - Trigger Interval: Defines an interval, in milliseconds, between acquisitions when the Trigger control is set to Continuous (0 to 10,000; default is 500). This delay is dependent upon the amount of time the job takes to complete processing the image. For example, if the Trigger Interval is set to 5,000 milliseconds, the In-Sight vision system acquires an image every 5,000 milliseconds, provided the job completes its image processing within 5,000 milliseconds. If not, the In-Sight acquires an image as soon as it completes processing the image.
-
Exposure (µsec): Defines the exposure time, in microseconds (0 to 1,000 µsec; default is 8 µsec). When the vision system receives a trigger signal, light is integrated in the line scan CCD array for the specified duration.
Note:- For the 5604, while this parameter can technically be set to 0, any value below 1.33 µsec will be exposed for 1.33 µsec, regardless of the defined Exposure value.
- For the 9902L, while this parameter can technically be set to 0, any value below 2.00 µsec will be exposed for 2.00 µsec , regardless of the defined Exposure value.
- Line Trigger Type: Defines the type of encoder: Software Encoder or Hardware Encoder. You must be connected to an In-Sight 5604 or 9902L to enable this control; this control is disabled for line scan emulators.
- Hardware Encoder: Specifies that the Steps Per Line setting and an external hardware encoder will be used to drive the line triggers. A Hardware Encoder is a device that digitizes the position of the target object by providing a signal transition every time the target moves a specified direction or distance. The In-Sight 5604 and In-Sight 9902L support two different types of Hardware Encoders: Single or Quadrature. For more information, see Line Scan Settings.
- Software Encoder (default): Specifies that the Line Period setting will be used as a clock to drive the line triggers at a defined interval. A Software Encoder is a software emulation of a hardware encoder and acquires lines at a defined rate. This method is primarily used for setup and troubleshooting, because this method is vulnerable to changes in target speed (low-frequency acceleration and higher-frequency shake) that could result in vertical image artifacts.
- Number of Lines: Defines the number of lines that will be acquired to construct an image from the line scan vision system.
- By default, the In-Sight 5604 produces standard area images in 1024 x 2048 resolution. The width cannot be adjusted. The maximum image height can be adjusted by pressing the Encoder Setup button to launch the Line Scan Settings dialog. The Number of Lines value can range from 1 to the Max Image Height.
- By default, the In-Sight 9902L produces standard area images in 2048 x 4096 resolution. The width and maximum image height can be adjusted by pressing the Encoder Setup button to launch the Line Scan Settings dialog. If the 1K Resolution (Low Light Mode) check box is selected, the width is decreased to 1024, providing increased light sensitivity. The Number of Lines value can range from 1 to the Max Image Height.
In-Sight Model Maximum Resolution Minimum Maximum Default In-Sight 5604 1024 x 8192 1 8192 2048 In-Sight 9902L 2048 x 16384 1 16384 4096 1024 x 16384 Note:- If acquiring images of rotating targets, the Number of Lines value should be smaller than number of rows between any two frame triggers to avoid missing image triggers.
- While this parameter can technically be set to 1, any value below 8 results in an unsuccessful image acquisition.
-
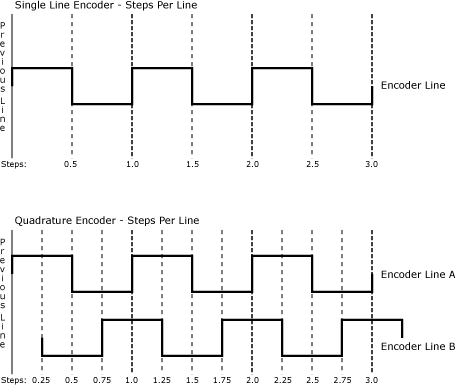
Steps Per Line: When Line Trigger Type is set to Hardware Encoder, defines the number of encoder steps per image line. A "step" is a complete cycle of the encoder signal, or signals, when a quadrature hardware encoder is used. For a single line hardware encoder, that is equivalent to two signal transitions, and for a quadrature hardware encoder, that is equivalent to four signal transitions.
In-Sight Model Steps Per Line In-Sight 5604 0.250 to 256.000; default = 40.000 In-Sight 9902L 0.250 to 8191.000; default = 40.000 Note:- The Steps Per Line value should be incremented by 0.5 for single line hardware encoders, and 0.25 for quadrature hardware encoders.
- For the 5604, to prevent missing line triggers, the Steps Per Line value must be configured so the shortest time between any two lines is 21.47 µsec greater than the Exposure setting (at a minimum of 1.33 µsec).
- For the 9902L, to prevent missing line triggers, the Steps Per Line value must be configured so the shortest time between any two lines is 3 µsec greater than the Exposure setting or 15µs, whichever is greater.
-
Line Period (µsec): When Line Trigger Type is set to Software Encoder, defines the time, in microseconds, per image line.
In-Sight Model Line Period In-Sight 5604 21.000 to 1000000.000; default = 40.000 In-Sight 9902L 21.000 to 1000000.000; default = 40.000 In-Sight Emulator 10.000 to 1000000.000; default = 40.000 Note:- For the 5604, to prevent missing line triggers, the Line Period value must be configured so the shortest time between any two lines is 21.47 µsec greater than the Exposure setting (at a minimum of 1.33 µsec).
- For the 9902L, to prevent missing line triggers, the Line Period value must be configured so the shortest time between any two lines is 3 µsec greater than the Exposure setting or 15µs, whichever is greater.
- Clip Mode: Defines an action if an image acquisition trigger is received, but the specified number of lines have not yet been acquired.
- No Clipping (default): Specifies that the image trigger will be ignored and an "Acquisition error" event will be generated.
- Fill Black: Specifies that the remaining lines will be filled with black pixels, and a new image will be immediately started. An "Acquisition error" event will not be generated.
Reduce Image Lines: Specifies that the current image will be reduced to the size of the number of rows currently acquired, and a new image will be immediately started.
Note:- When either Fill Black or Reduce Image Lines are selected:
- Set the Trigger type to Camera to clip images properly. With any other Trigger type, if the trigger arrives while an image is being acquired, the current image is not clipped and the trigger is missed.
- If a Set Event Native Mode command is sent to trigger an acquisition and the trigger arrives while an image is being acquired, the current image is not clipped and the trigger is missed.
- For time-critical applications, select the Reduce Image Lines option. Or, if using the Fill Black option, keep the fill under a few hundred lines.
- For the 5604, the Fill Black option requires roughly 2 µsec per line of fill (e.g., 0.2 milliseconds for 100 lines).
- For the 9902L, the Fill Black option requires roughly 3 µsec per line of fill (e.g. 0.3 milliseconds for 100 lines).
- Acquisition Duration: Specifies when to end image acquisition when the Clip Mode parameter is set to Fill Black or Reduce Image lines. This option is only supported for the In-Sight 9902L vision system when Camera is the selected Trigger type.
- 0 = Next Trigger (default): Image acquisition begins at the leading edge of the trigger pulse and ends at the beginning of the next trigger signal.
- 1 = End of Trigger: Image acquisition begins at the leading edge of the trigger pulse and ends at the trailing edge of the trigger pulse. Image acquisition is complete when either:
- The specified Number of Lines have been acquired, even if the trailing edge of the trigger pulse has not yet arrived.
The trailing edge of the pulse arrives and terminates acquisition before the specified Number of Lines have been acquired.
Note: When End of Trigger is selected, the Delay parameter is disabled and no delay is applied to the acquisition.