SetSystemConfig
次のパラメータは、SetSystemConfig Evaluate ネイティブモードコマンドと組み合わせて、システムパラメータを設定するために使用されます。
アクティブセル制限
[アクティブセル制限] ダイアログ内の使用可能なスプレッドシートセルの数を設定します。
関数の入力パラメータ
シンタックス: EVSetSystemConfig("ActiveCellLimit",Limit,WriteProcSet)
| 入力 | 説明 |
|---|---|
| "ActiveCellLimit" | [アクティブセル制限] ダイアログの設定を参照します。 |
| 制限 (Limit) |
アクティブセルの制限、セル単位(2048 ~ 10400)、6144* 注 : In-Sight 5000 ビジョンシステムのアクティブセルの制限は 4,096 セルで、変更できません。
|
| プロシージャセットの書き込み (WriteProcSet) |
0 = 設定は proc.set ファイルに保存されません。ビジョンシステム/センサの電源を入れ直すと、設定は失われます。* 1 = 設定は proc.set ファイルに保存されます。ビジョンシステム/センサの電源を入れ直しても、設定は失われません。 |
| * はデフォルト値を示します。 | |
関数の結果出力
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
1 |
コマンドは正常に実行されました。 |
|
0 |
認識されないコマンドが送信されました。 |
|
-2 |
コマンドを実行することができませんでした。 |
|
-6 |
ユーザはコマンドを実行するためのフルアクセスのアクセス権を持っていません。 |
入力パラメータ
| 入力 | 説明 |
|---|---|
|
"ActiveCellLimit" |
[アクティブセル制限] ダイアログの設定を参照します。 |
|
制限 (Limit) |
アクティブセルの制限、セル単位(2048 ~ 10400)、6144* 注 : In-Sight 5000 ビジョンシステムのアクティブセルの制限は 4,096 セルで、変更できません。
|
|
プロシージャセットの書き込み (WriteProcSet) |
0 = 設定は proc.set ファイルに保存されません。ビジョンシステム/センサの電源を入れ直すと、設定は失われます。* 1 = 設定は proc.set ファイルに保存されます。ビジョンシステム/センサの電源を入れ直しても、設定は失われません。 |
|
* はデフォルト値を示します。 |
|
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
例
アクティブセル制限を 8,192 に指定するには、次のコマンドを発行します。EV SetSystemConfig("ActiveCellsLimit",8192,1)
In-Sight ビジョンシステムは、ステータスコード (1) とその後の文字数 (バイト単位、20) で応答します。最後に、制限が設定されたことを示す 1、または制限が設定されていないことを示す 0 のどちらかの結果コードが返されます。変更を有効にするには、In-Sight ビジョンシステムの電源を入れ直す必要があります。
DHCP タイムアウト
[ネットワークの設定] ダイアログの [DHCP タイムアウト] の設定を行います。
入力パラメータ
Syntax:EVSetSystemConfig("DHCPTimeout",Timeout,WriteProcSet)
|
入力 |
説明 |
|---|---|
|
[DHCP タイムアウト] 設定を参照します。 |
|
|
タイムアウト |
(5 ~ 180)、60* |
|
プロシージャセットの書き込み (WriteProcSet) |
0 = 設定は proc.set ファイルに保存されません。ビジョンシステム/センサの電源を入れ直すと、設定は失われます。* 1 = 設定は proc.set ファイルに保存されます。ビジョンシステム/センサの電源を入れ直しても、設定は失われません。 |
|
* はデフォルト値を示します。 |
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
例
30 秒の DHCP タイムアウトを指定するには、次のコマンドを発行します。EVSetSystemConfig("DHCPTimeout",30,1)
In-Sight ビジョンシステムは、ステータスコード (1) とその後の文字数 (バイト単位、18) で応答します。最後に、[DHCP タイムアウト] 設定 (30) が返されます。
Telnet ポート
[ネットワークの設定] ダイアログの [Telnet ポート] の設定を行います。
入力パラメータ
EVSetSystemConfig("DHCPTimeout",Timeout,WriteProcSet)
|
入力 |
説明 |
|---|---|
|
[Telnet ポート] 設定を参照します。 |
|
|
ポート (Port) |
(1 ~ 65535)、23* |
|
プロシージャセットの書き込み (WriteProcSet) |
1 = 設定は proc.set ファイルに保存されます。ビジョンシステム/センサの電源を入れ直しても、設定は失われません。 |
|
* はデフォルト値を示します。 |
- 有効なポート割り当ては、1 ~ 65535 の未使用の番号ですが、21、68、80、502、1069、1070、1212、2222、44818、および 50000 (In-Sight 通信のために予約済み) を除きます。
- [Telnet ポート] 設定を有効にするには、ビジョンシステムを再起動する必要があります。
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
例
Telnet ポート 2000 を指定するには、次のコマンドを発行します。EVSetSystemConfig("TelnetPort",2000,1)
In-Sight ビジョンシステムは、ステータスコード (1) とその後の文字数 (バイト単位、18) で応答します。最後に、[Telnet ポート] 設定 (2000) が返されます。
ネットワーク要求リンクモード
[ネットワークの設定] ダイアログで [リンクスピード] の設定を行います。このコマンドの発行後は、ビジョンシステムを再起動して変更を有効にする必要があります。
入力パラメータ
Syntax:EVSetSystemConfig("Network.RequestedLinkMode",LinkSpeed,WriteProcSet)
|
入力 |
説明 |
|---|---|
|
"Network.RequestedLinkMode" |
[リンクスピード] 設定を参照します。 |
| リンクスピード (LinkSpeed) |
0 = オートネゴシエーション* 100 = 10 Mbps 半二重 101 = 10 Mbps 全二重 102 = 100 Mbps 半二重 103 = 100 Mbps 全二重 104 = 1000 Mbps 全二重 |
|
プロシージャセットの書き込み (WriteProcSet) |
1 = 設定は proc.set ファイルに保存されます。ビジョンシステム/センサの電源を入れ直しても、設定は失われません。 |
|
* はデフォルト値を示します。 |
|
- [1000 Mbps 全二重] オプションは、1000 Mbps イーサネット速度をサポートするビジョンシステムだけで使用できます。In-Sight 5600 シリーズのビジョンシステムの場合、128MB 以上の不揮発性フラッシュメモリを搭載したモデルだけで使用できます。
- GetSystemConfig コマンドを使って、ビジョンシステムでサポートされるリンク速度とデュプレックスモードを決定します。
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
例
100 Mbps 全二重を使用するようビジョンシステムを設定するには、次のコマンドを発行します。EVSetSystemConfig("Network.RequestedLinkMode",103,1)
In-Sight ビジョンシステムは、ステータスコード (1) とその後の文字数 (バイト単位、20) で応答します。最後に、現在のリンクスピード (103) が返されます。
ライブ画像
[画像の設定] ダイアログで [ライブ取り込み] の設定を行います。
|
Syntax:EVSetSystemConfig("LiveImage",Resolution,MaxFrameRate) |
入力パラメータ
|
入力 |
説明 |
|---|---|
|
[ライブ画像] 設定を参照します。 |
|
|
解像度 |
1 = フル 0 または 2 = ハーフ* 3 = クォーター |
|
最大フレームレート (MaxFrameRate) |
(0.016 ~ 100)、0* |
|
* はデフォルト値を示します。 |
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
例
ハーフ解像度のライブ画像を最大レート 0.064 フレーム/秒で使用するようにビジョンシステムを設定するには、次のコマンドを発行します。EVSetSystemConfig("LiveImage",1,0.064)
In-Sight ビジョンシステムは、ステータスコード (1) とその後の文字数 (バイト単位、18) で応答します。最後に、[ライブ取り込み] 設定 (1 0.064) が返されます。
オンライン画像
[画像の設定] ダイアログで [オンライン解像度] の設定を行います。
入力パラメータ
Syntax:EVSetSystemConfig("OnlineImage",Resolution,MaxFrameRate)
|
入力 |
説明 |
|---|---|
|
[オンライン画像] 設定を参照します。 |
|
|
解像度 |
0 = 最適* 1 = フル 2 = ハーフ 3 = クォーター |
|
最大フレームレート (MaxFrameRate) |
(0.016 ~ 100)、0* |
|
* はデフォルト値を示します。 |
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
例
ハーフ解像度のオンライン画像を最大レート 0.064 フレーム/秒で使用するようにビジョンシステムを設定するには、次のコマンドを発行します。EVSetSystemConfig("OnlineImage",2,0.064)
In-Sight ビジョンシステムは、ステータスコード (1) とその後の文字数 (バイト単位、18) で応答します。最後に、[ライブ取り込み] 設定 (2 0.064) が返されます。
有効なサービス
[ネットワークの設定] ダイアログの [プロトコルサービス] の設定を行います。
|
Syntax:EVSetSystemConfig("ServicesEnabled",Services,Mask) |
入力パラメータ
| 入力 | 説明 | |||||||||||||||||||||||||||
| "ServicesEnabled" | [プロトコルサービス] 設定を参照します。 | |||||||||||||||||||||||||||
| サービス (Services) |
ビジョンシステム上で有効にするすべてのサービスを指定します。サービス (Services) パラメータは、10 進値に変換されるバイナリ値です。
複数のサービスを有効にするには、有効にするサービスのバイナリ値を求めて、それを 10 進値に変換します。 |
|||||||||||||||||||||||||||
| マスク (Mask) |
ビジョンシステム上で変更するサービスを指定します。マスク (Mask) パラメータは、10 進値に変換されるバイナリ値です。
複数のサービスを変更するには、変更するサービスのバイナリ値を求めて、それを 10 進値に変換します。 |
|||||||||||||||||||||||||||
| * はデフォルト値を示します。 | ||||||||||||||||||||||||||||
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
例
1 つのサービスを有効にして変更するには
現在、有効になっているサービスはなく、PROFINET サービスを有効にする必要があるとします。次のコマンドを発行します。EVSetSystemConfig("ServicesEnabled",4,4)
In-Sight ビジョンシステムは、ステータスコード (1) とその後の文字数 (バイト単位、20) で応答します。最後に、有効になったサービス (4) が返されます。
すべてのサービスを無効にする
すべてのサービスを無効にするので、サービス (Services) パラメータは 0 であることがわかります。
-
サービスの変更に使用するバイナリ値を求めます。
サービス
PROFINET
EtherNet/IP
Modbus
バイナリ
1
1
1
-
バイナリ値を 10 進値に変換します。これによって、マスク (Mask) パラメータ値が得られます。
111 = 7
-
次のコマンドを発行します。EVSetSystemConfig("ServicesEnabled",0,7)
In-Sight ビジョンシステムは、ステータスコード (1) とその後の文字数 (バイト単位、20) で応答します。最後に、有効になったサービス (0) が返されます。
監査有効化設定
アクティブなビジョンシステムの自動監査メッセージを有効または無効にします。また、監査メッセージが生成されるイベントのタイプを指定します。
入力パラメータ
Syntax:EVSetSystemConfig("AuditEnableSettings",Enabled,SystemEvents,TaggedCells,SystemSettings,WriteProcSet)
|
入力 |
説明 |
|---|---|
|
"AuditEnableSettings" |
[監査有効化 (Audit Enable)] 設定を参照します。 |
|
有効 (Enabled) |
0* = アクティブなビジョンシステムの自動監査メッセージを無効にします。 1 = アクティブなビジョンシステムの自動監査メッセージを有効にします。 |
|
システムイベント (SystemEvents) |
0 = 無効。 1* = In-Sight のシステムイベントが発生した場合 (ビジョンシステムのログオン/ログオフ、ジョブのロードまたは保存、オンラインモードからオフラインモードへの遷移、システムの起動、およびファームウェア更新) に、監査メッセージが生成されます。 |
|
タグ付きセル (TaggedCells) |
0 = 無効。 1* = In-Sight Explorer、カスタムアプリケーション、VisionView、または PLC を使用して、シンボリックタグ付きセルを編集する (例えば、セルの数式または対話型コントロールの値を変更する場合) と、監査メッセージが生成されます。 |
|
システム設定 (SystemSettings) |
0 = 無効。 1* = システム設定 (proc.set ファイルに保存されている設定) を変更すると、監査メッセージが生成されます。 |
|
プロシージャセットの書き込み (WriteProcSet) |
0 = 設定は proc.set ファイルに保存されません。ビジョンシステム/センサの電源を入れ直すと、設定は失われます。* 1 = 設定は proc.set ファイルに保存されます。ビジョンシステム/センサの電源を入れ直しても、設定は失われません。 |
|
* はデフォルト値を示します。 |
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
例
システム設定値が変更され、その設定値が proc.set ファイルに保存されたときにアクティブなビジョンシステムの監査メッセージの生成を有効にするには、次のメッセージを発行します。EVSetSystemConfig("AuditEnableSettings",1,0,0,1,1)
In-Sight ビジョンシステムは、ステータスコード (1) とその後の文字数 (バイト単位、20) で応答します。最後に、結果が XML フォーマットで返されます。
監査IP設定
監査メッセージサーバの IP アドレスおよび TCP/IP ポートを指定します。
入力パラメータ
Syntax:EVSetSystemConfig("AuditIPSettings","IPAddress",Port,WriteProcSet)
|
入力 |
説明 |
|---|---|
|
"AuditIPSettings" |
[監査 IP (Audit IP)] 設定を参照します。 |
|
"IPAddress" |
監査メッセージサーバの IP アドレスを指定します。 |
|
ポート (Port) |
監査メッセージサーバの TCP/IP ポートを指定します。(デフォルト = 5753) 注 : 有効なポート番号は、In-Sight 通信のために予約されているポートを除いて、1 ~ 65535 の未使用の任意の番号です。 |
|
プロシージャセットの書き込み (WriteProcSet) |
0 = 設定は proc.set ファイルに保存されません。ビジョンシステム/センサの電源を入れ直すと、設定は失われます。* 1 = 設定は proc.set ファイルに保存されます。ビジョンシステム/センサの電源を入れ直しても、設定は失われません。 |
|
* はデフォルト値を示します。 |
|
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
例
監査メッセージサーバの IP アドレスおよび TCP/IP ポートを指定して、設定を proc.set ファイルに保存するには、次のコマンドを発行します。EVSetSystemConfig("AuditIPSettings","192.168.0.13",5753,1)
In-Sight ビジョンシステムは、ステータスコード (1) とその後の文字数 (バイト単位、20) で応答します。最後に、結果が XML フォーマットで返されます。
トリガタイムスタンプ
In-Sight ビジョンシステムが CIP-Sync および Precision Time Protocol (PTP) 経由で通信するように設定されている場合、PLC からタイムスタンプが書き込まれるユーザデータフィールドのオフセットをシステム構成変数 "EIP.TriggerTimestampInputOffset" に設定するには、SetSystemConfig コマンドを使用します。
入力パラメータ
Syntax:EVSetSystemConfig("Eip.TriggerTimestampInputOffset",Offset)
|
入力 |
説明 |
|---|---|
|
"Eip.TriggerTimestampInputOffset" |
64 ビットのタイムスタンプをマイクロ秒単位でキャプチャするための EtherNet/IP 入力アセンブリへのオフセットと、それに続けてビジョンシステムのトリガに使用される 64 ビットのシステム時間オフセットをマイクロ秒単位 (合計 16 バイト) で設定します。 |
|
オフセット (Offset) |
オフセット (0 ~ 500) を指定します。この設定を無効にするには、この変数を -1 に設定します。 |
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
画像バッファを増加
ビジョンシステムの解像度と RAM サイズに基づいて、In-Sight ビジョンシステムに割り当てられる画像バッファのデフォルト数を増やすことができます。このコマンドの実行後、変更を有効化するには、ビジョンシステムの電源を入れ直す必要があります。
入力パラメータ
Syntax:EVSetSystemConfig("StartupImageBuffers",NumberofBuffers,WriteProcSet)
|
入力 |
説明 |
|---|---|
|
"StartupImageBuffers" |
起動時にビジョンシステムに割り当てられる画像バッファの数を設定します。 |
|
バッファの数 (NumberofBuffers) |
ビジョンシステムに割り当てられるバッファの数を設定します。 注 : バッファの数 (NumberofBuffers) が 0 に設定されている場合、バッファ数のデフォルト値が使用されます。
|
|
プロシージャセットの書き込み (WriteProcSet) |
0 = 設定は proc.set ファイルに保存されません。ビジョンシステム/センサの電源を入れ直すと、設定は失われます。* 1 = 設定は proc.set ファイルに保存されます。ビジョンシステム/センサの電源を入れ直しても、設定は失われません。 |
| * はデフォルト値を示します。 |
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
ExtractBlobs メモリ割り当ての調整
ExtractBlobs 関数に対するメモリを手動で割り当てられるようにします。この設定を使用する場合、指定する値は ExtractBlobs 関数の対象領域 (ROI) 内にあるピクセル数の半分以下でなければなりません。
入力パラメータ
Syntax:EVSetSystemConfig("ExtractBlobsMemory",k)
|
入力 |
説明 |
|---|---|
|
"ExtractBlobsMemory" |
ExtractBlobs 関数の起動時にビジョンシステムに割り当てられるメモリの量を設定します。 |
|
k |
ExtractBlobs 関数の使用時にビジョンシステムに割り当てられるメモリの量を指定します。k の値は、使用する ROI のサイズおよび画像の品質によって異なります。小さめの値から初めて、少しずつ増やします。例えば、ROI <= 640 × 480 で、斑点のある画像では、値は 8,000 から始めて、1,000 ずつ増やします。ROI <= 1600 × 1200 の場合は 32,000 から始めて 1,000 ずつ増やします。ROI <= 2448 × 2048 の場合は 128,000 から始めて 1,000 ずつ増やしていきます。 注 : ExtractBlobs のデフォルトのメモリ割り当てに戻すには 0 を入力します。
|
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
デフォルトのフォーカス位置
In-Sight 7000 シリーズのビジョンシステムがビジョンシステムの proc.set ファイルにフォーカスの位置を保存できるようにします。
入力パラメータ
Syntax:EVSetSystemConfig("DefaultFocusPosition",Position,Apply,WriteProcSet)
|
入力 |
説明 |
|---|---|
|
"DefaultFocusPosition" |
起動時にビジョンシステムにより使用されるデフォルトのフォーカス位置を設定します。 |
|
位置 (Position) |
デフォルトのフォーカス位置 (0 ~ 100) を指定します。この設定を無効にするには、この変数を -1 に設定します。 |
|
適用 (Apply) |
0* = In-Sight ビジョンシステムの電源を入れ直した後に設定が適用されます。 1 = 直ちに設定が適用されます。 |
|
プロシージャセットの書き込み (WriteProcSet) |
0 = 設定は proc.set ファイルに保存されません。ビジョンシステム/センサの電源を入れ直すと、設定は失われます。* 1 = 設定は proc.set ファイルに保存されます。ビジョンシステム/センサの電源を入れ直しても、設定は失われません。 |
| * はデフォルト値を示します。 | |
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
ストロボ開始位置
[出力詳細] ダイアログで [ストロボ開始位置] の設定を行います。
入力パラメータ
Syntax:EVSetSystemConfig("StrobeStartPosition",Position,WriteProcSet)
|
入力 |
説明 |
|---|---|
|
"StrobeStartPosition" |
ストロボを開始するタイミングを指定します。 |
|
位置 (Position) |
0* = 画像取り込み開始。ストロボは、In-Sight ビジョンシステムが画像取り込みを開始するときにパルス出力します。In-Sight 8405 ビジョンシステムを除くすべてのビジョンシステムモデルでサポートされています。 1 = カメラトリガ。ストロボは、カメラトリガイベントを受信するとパルス出力します。In-Sight 8405 ビジョンシステムを除くすべてのビジョンシステムモデルでサポートされています。 2 = すべての行を露光。ストロボは、すべてのピクセル行が露光されたときにのみパルス出力します。In-Sight 8405 ビジョンシステムでのみサポートされています。 注 : In-Sight 8405 ビジョンシステムでストロボを使用している場合、フルフレーム画像キャプチャでは、ストロボのパルス時にすべてのピクセル行が露光されるよう、露光時間を 72ms 以上に設置することが推奨されます。 |
|
プロシージャセットの書き込み (WriteProcSet) |
0 = 設定は proc.set ファイルに保存されません。ビジョンシステム/センサの電源を入れ直すと、設定は失われます。* 1 = 設定は proc.set ファイルに保存されます。ビジョンシステム/センサの電源を入れ直しても、設定は失われません。 |
| * はデフォルト値を示します。 | |
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
例
In-Sight ビジョンシステムが画像取り込みを開始するときにストロボが作動するように指定するには、次のコマンドを発行します。EVSetSystemConfig("StrobeStartPosition",0,1)
In-Sight ビジョンシステムは、ステータスコード (1) とその後の文字数 (バイト単位、20) で応答します。最後に、結果が XML フォーマットで返されます。
PulseJobChangeTiming
ジョブ変更 (パルス) 信号タイプとして設定されている場合に、In-Sight 2000 シリーズのセンサでのジョブをディスクリート入力ライン 0 を介して変更する場合の入力パルスの幅を指定します。ジョブ変更は、パルス幅の異なる入力パルスを検出することによって開始されます。このパルスは外部デバイス (PLC など) によって生成され、In-Sight 2000 センサに送信されます。まず、外部デバイスから開始パルスを生成します。次に、外部デバイスから、パルス間にギャップのあるカウントパルスを発行します。最後に、外部デバイスから停止パルスを発行します。すべてのパルスおよびパルスギャップが指定のパルス長にマッチすると、ジョブ変更リクエストに成功し、ジョブがセンサにロードされます。これらの条件に 1 つでも満たない場合 (パルスまたはパルスギャップのタイミングが正しくない場合)、ジョブ変更リクエストに失敗し、ジョブ変更は起こりません。
入力パラメータ
Syntax:EVSetSystemConfig("PulseJobChangeTiming",StartPulse,StopPulse,CountPulse,PulseGap,Tolerance,WriteProcSet)
|
入力 |
説明 |
|---|---|
| "PulseJobChangeTiming" | ジョブ変更 (パルス) のタイミングを指定します。 |
| 開始パルスの幅 (StartPulseWidth) |
開始パルスの幅を指定します。 1 ミリ秒 ~ 22000 ミリ秒 (デフォルト = 20 ± 1 ミリ秒) |
| 停止パルスの幅 (StopPulseWidth) |
停止パルスの幅を指定します。 1 ミリ秒 ~ 22000 ミリ秒 (デフォルト = 20 ± 1 ミリ秒) |
| カウントパルスの幅 (CountPulseWidth) |
カウントパルスの幅を指定します。 1 ミリ秒 ~ 22000 ミリ秒 (デフォルト = 10 ± 1 ミリ秒) |
| パルスギャップの幅 (PulseGapWidth) |
パルスギャップの幅を指定します。 1 ミリ秒 ~ 22000 ミリ秒 (デフォルト = 10 ± 1 ミリ秒) |
| 許容値 (Tolerance) |
パルス幅の許容値を指定します。 > 0 ミリ秒 |
|
プロシージャセットの書き込み (WriteProcSet) |
0 = 設定は proc.set ファイルに保存されません。設定は In-Sight センサの電源を入れ直すと失われます。 1 = 設定は、proc.set ファイルに保存され、In-Sight ビジョンシステムの電源を入れ直しても保持されます。 |
|
* はデフォルト値を示します。 |
|
出力
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
例
パルス幅値を指定する
パルスジョブ変換タイミングを指定して設定を proc.set ファイルに保存するには、次のコマンドを発行します。
EVSetSystemConfig("PulseJobChangeTiming",15000,15000,10000,1000,100,1)
In-Sight センサは、ステータスコード (1) とその後の文字数 (バイト単位、20) で応答します。最後に、結果が XML フォーマットで返されます。
現在のパルス幅値を取得する
現在のパルス幅値を取得するには、次のコマンドを発行します。EVSetSystemConfig("PulseJobChangeTiming")
In-Sight センサは、ステータスコード (1) とその後の文字数 (バイト単位、45) で応答します。最後に、結果が XML フォーマットで返されます。
起動時にシリアルハローメッセージを発信
In-Sight ビジョン・システムおよびビジョンセンサから、ビジョン・システム/センサの起動が完了し使用可能な状態になったことを警告するハローメッセージを、シリアル接続を介して発信します。
シリアルハローメッセージをリスンしているデバイスに発信するには、次の条件が必要となります。
- ビジョン・システム/センサに、ハローメッセージが設定されている。
- ビジョン・システム/センサが、シリアルを介し、メッセージをリスンしているデバイス (HyperTerm を実行している PC など) に接続されている。
-
ビジョン・システム/センサのシリアルポートが、[Text] または [Native] モードに設定されている。デフォルトでは、シリアルポートは [Native] モードに設定されています。詳細については、[シリアルポートの設定] ダイアログをご参照ください。
注 : [シリアルポートの設定] ダイアログは、スプレッドシートビューのみで表示されます。EasyBuilder ビューのみをサポートしているモデルをご使用の場合、シリアルポートの設定は変更することができません。この場合、常に、[Native] モードに設定されます。
シリアルハローメッセージの設定後、ビジョン・システム/センサを再起動すると、リスンしているデバイスはハローメッセージを起動の最終シーケンスで検出します。検出までに、数分かかることがあります。
Syntax:EV SetSystemConfig("Comms.Serial.Hello","Message",PortNumber,WriteProcSet)
入力パラメータ
|
入力 |
説明 |
|---|---|
| "Comms.Serial.Hello" |
ビジョン・システム/センサを、シリアル通信を介し、ハローメッセージを起動時に発信するように設定します。 |
| "Message" |
ハローメッセージを指定します。(例: "I'm here") |
| PortNumber |
ポート番号を指定します。常に "1" となります。 |
|
WriteProcSet |
1 = 設定は、proc.set ファイルに保存され、In-Sight ビジョンシステムの電源を入れ直しても保持されます。このコマンドは、ビジョンシステムに電源を再投入後に有効になるため、常に "1" となります。 |
出力結果
|
戻り値 |
ステータスコード。その後に結果の文字数 (バイト単位) と結果 (XML フォーマット) が続きます。
|
例
次に、telnet を介し、ハローメッセージを設定、取得、無効にする例を示します。
ハローメッセージおよびシリアルポートの設定
-
ハローメッセージ ("I'm here") を設定し、その設定を proc.set ファイルに設定するには、次のコマンドを発行します。
EV SetSysetmConfig("Comms.Serial.Hello","I'm here",1,1)
In-Sight ビジョンシステム/センサは、ステータスコード (1) とその後の文字数 (バイト単位、20) で応答します。最後に、結果が XML フォーマットで返されます。
注 : 成功した場合、コマンドは以前に設定されたハローメッセージを上書きします。
ハローメッセージおよびシリアルポートの取得
-
ハローメッセージを取得するには、次のコマンドを発行します。
EV SetSystemConfig("Comms.Serial.Hello")
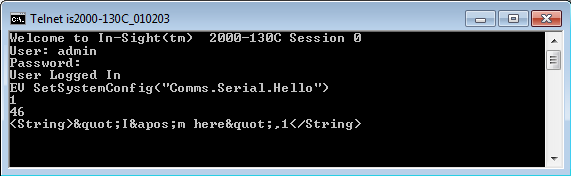
In-Sight ビジョンシステム/センサは、ステータスコード (1) とその後の文字数 (バイト単位、46) で応答します。最後に、メッセージ ("I'm here") およびポート番号 (1) が XML フォーマットで返されます。
ハローメッセージおよびシリアルポートの無効化
-
ハローメッセージを無効にするには、次のコマンドを発行します。
EV SetSysetmConfig("Comms.Serial.Hello","",0,1)
注 : 空の引用符 ("") はハローメッセージ設定を消去します。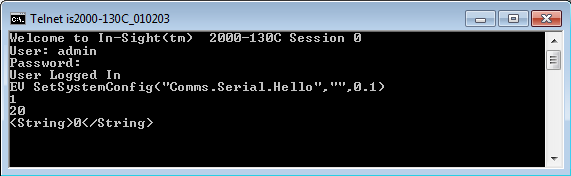
In-Sight ビジョンシステム/センサは、ステータスコード (1) とその後の文字数 (バイト単位、20) で応答します。最後に、結果が XML フォーマットで返されます。